Δεδομένου ότι οι μέθοδοι θα πρέπει να καλεστούν και εκτελεστούν με παραπάνω από μία τεχνική επιλογής βήματος $\gamma_k$, δημιουργήσαμε εσωτερικά της κάθε μεθόδου ένα κοινό interface για τις μεθόδους επιλογής βήματος.
Αυτό έχει τη μορφή: \textit{\textbf{gamma\_<method>(f, dk, xk)}}, όπου το \textbf{f} είναι η αντικειμενική συνάρτηση, \textbf{dk} η τιμή της συνάρτησης κλίσης στο xk και \textbf{xk} το σημείο ενδιαφέροντος.
Αυτό έχει τη μορφή: \textit{\textbf{gamma\_<method>(f, grad\_f, dk, xk)}}, όπου το \textbf{f} είναι η αντικειμενική συνάρτηση, \textbf{grad\_f} η συνάρτηση κλίσης της, \textbf{dk} η τιμή της συνάρτησης κλίσης στο xk και \textbf{xk} το σημείο ενδιαφέροντος.
Για την κάθε μία από αυτές δημιουργήσαμε ξεχωριστή συνάρτηση που υλοποιεί το παραπάνω interface.
Μία για σταθερό βήμα, μία για επιλογή βήματος που ελαχιστοποιεί την $f(x_k + \gamma_k d_k)$ και μία με τη μέθοδο Armijo.
Για την επιλογή και κλήση των μεθόδων επιλογής βήματος εισαγάγαμε μία νέα παράμετρο string που χρησιμοποιείται ως enumerator και με βάση αυτή γίνεται η τελική επιλογή.
@@ -93,7 +101,7 @@
Για το λόγο αυτό, ενώ η συνάρτηση δίνεται ως symbolic expression, μέσω αυτής υπολογίζονται αυτόματα η κλίση, ο Εσσιανός αλλά και οι “κανονικές” συναρτήσεις MATLAB που τις υλοποιούν.
Έτσι έχουμε την ακριβή αναπαράσταση της κλίσης και του Εσσιανού ως συναρτήσεις χωρίς να πληρώνουμε το κόστος της subs().
\section{Απεικόνιση της συνάρτησης}
\section{Απεικόνιση της συνάρτησης - Θέμα 1}
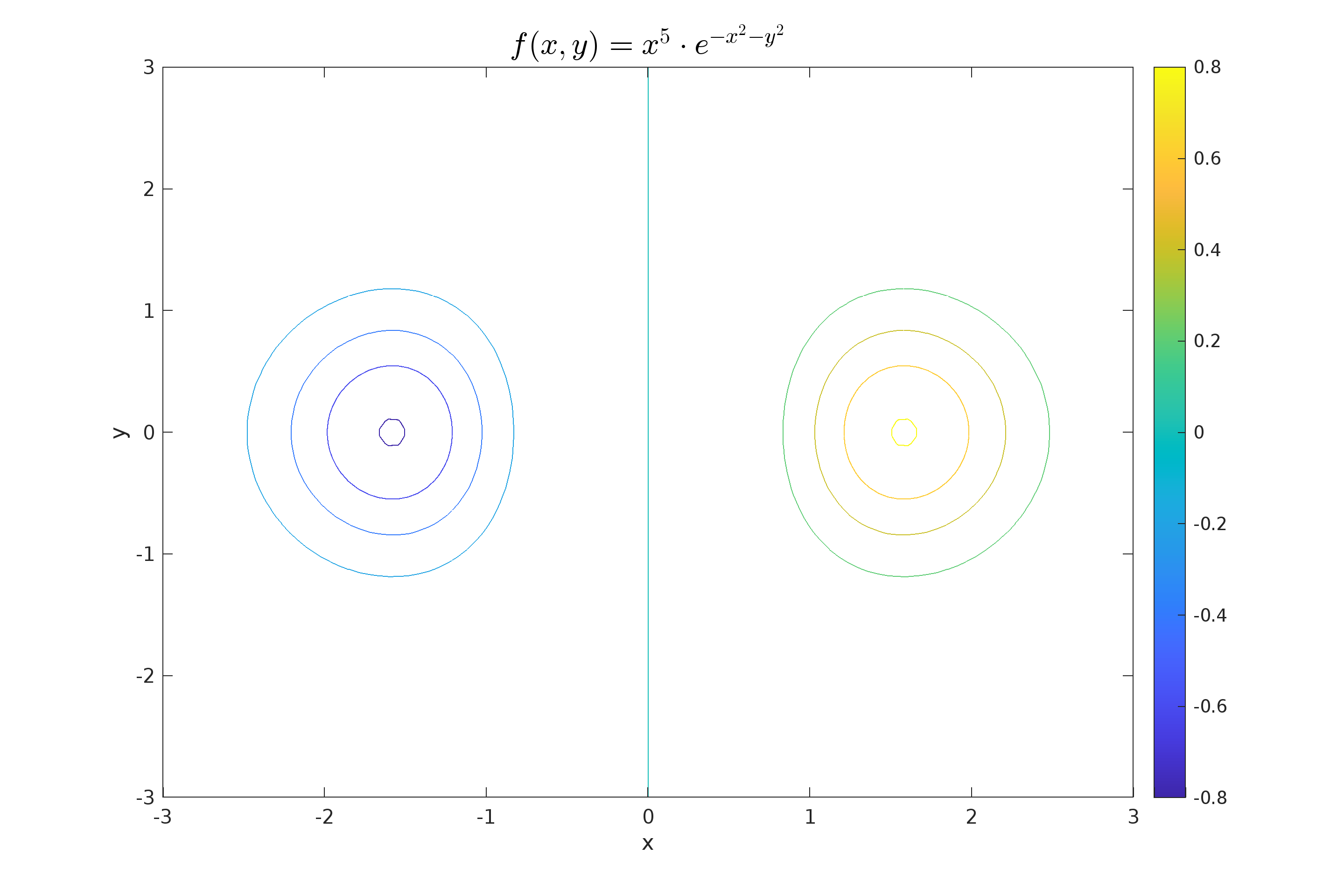
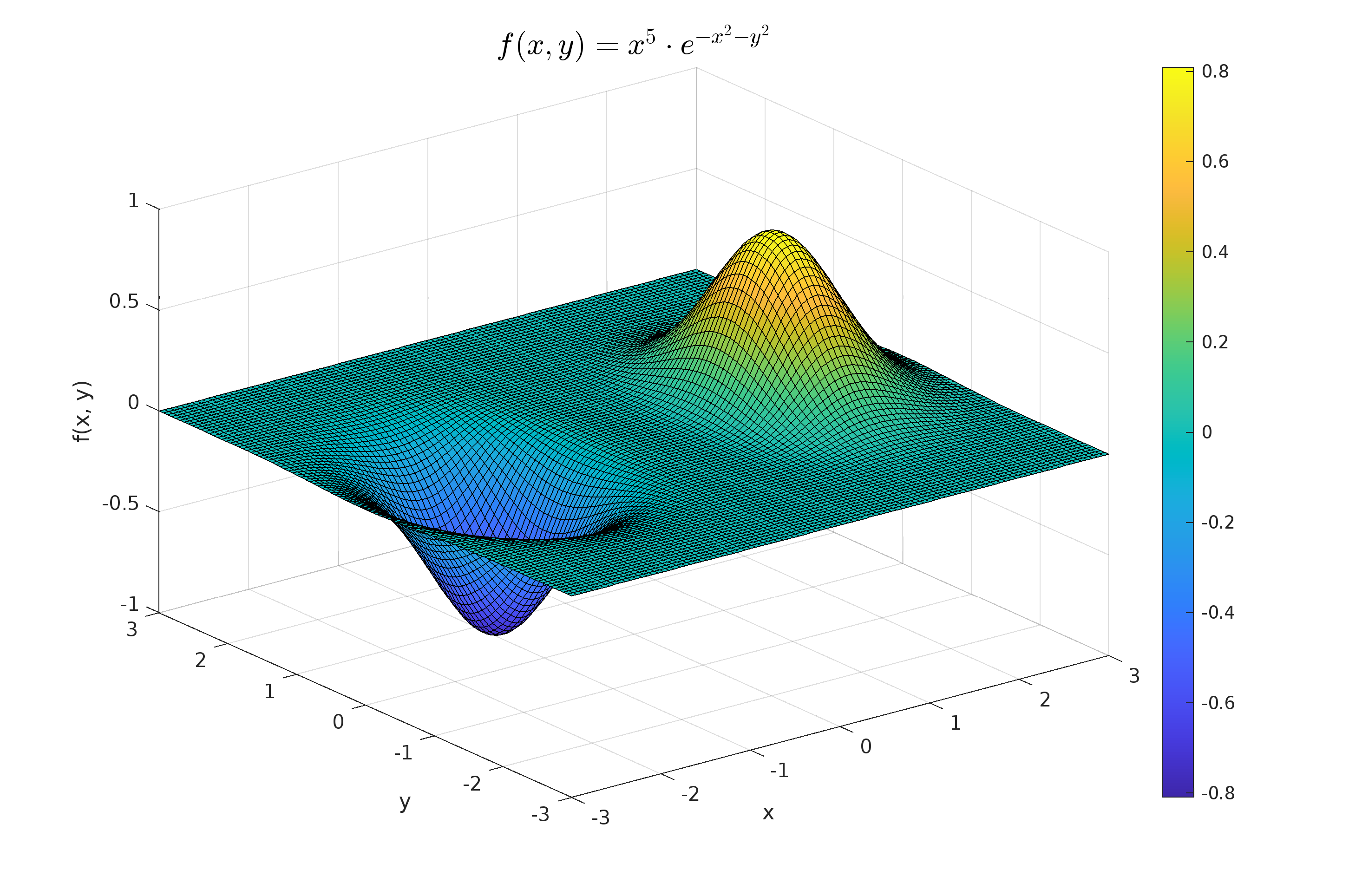
Η συνάρτηση με την οποία ασχολούμαστε στην παρούσα εργασία είναι η:
\boldmath
\begin{equation}
@@ -102,11 +110,11 @@
\label{eq:ObjectiveFunction}
\unboldmath
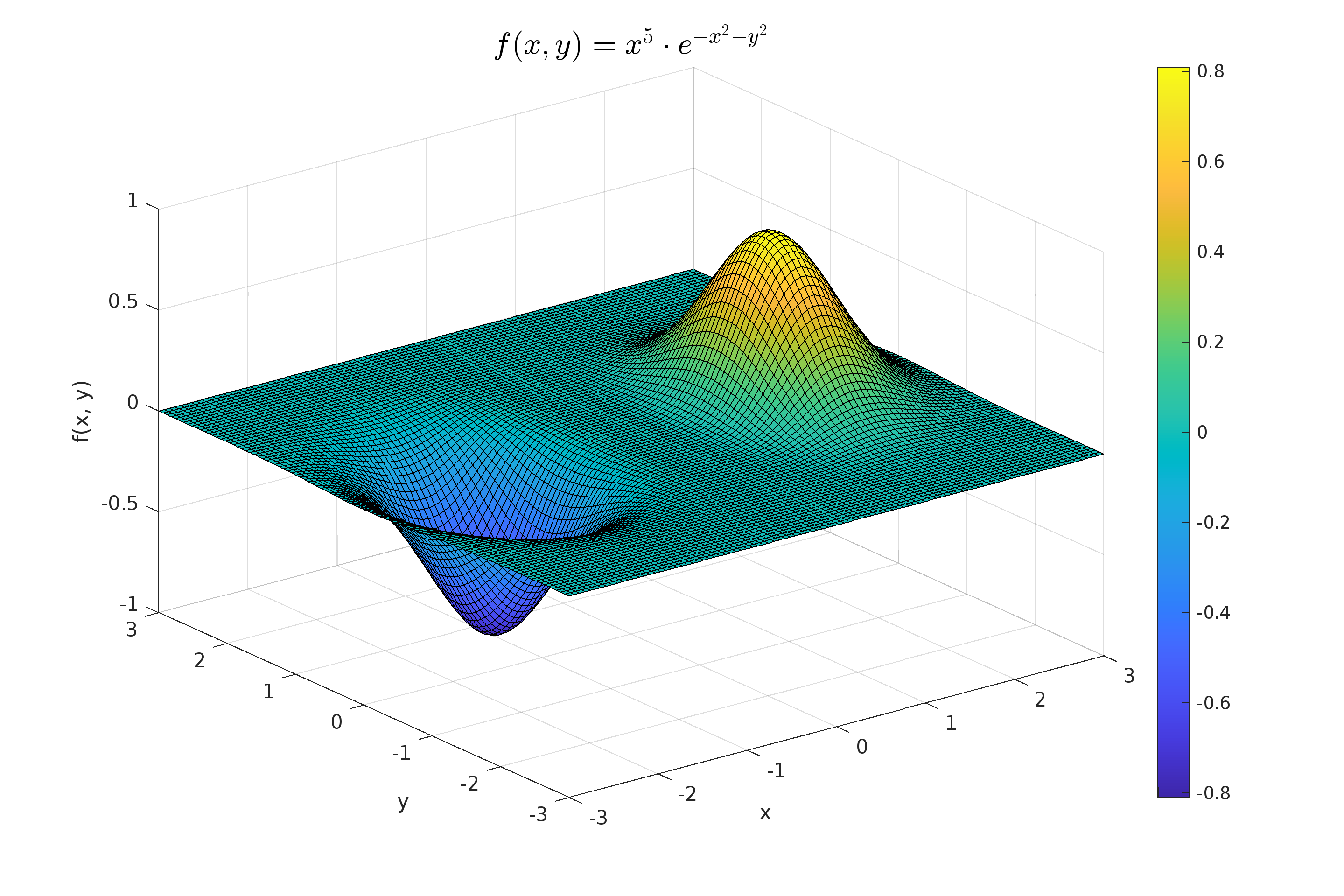
Στο παρακάτω σχήμα \ref{fig:plot3dFunction} φαίνεται η τρισδιάστατη απεικόνιση της συνάρτησης.
\InsertFigure{!h}{0.8}{fig:plot3dFunction}{../scripts/figures/FunctionPlot.png}{Γραφική παράσταση της f}
\InsertFigure{!h}{0.8}{fig:plot3dFunction}{../scripts/figures/Plot_Function.png}{Γραφική παράσταση της f}
Από το σχήμα μπορούμε πολύ εύκολα να διακρίνουμε ότι η συνάρτηση έχει ένα ευκρινές μέγιστο και ένα ελάχιστο στο διάστημα $x,y \in [-3, 3]$.
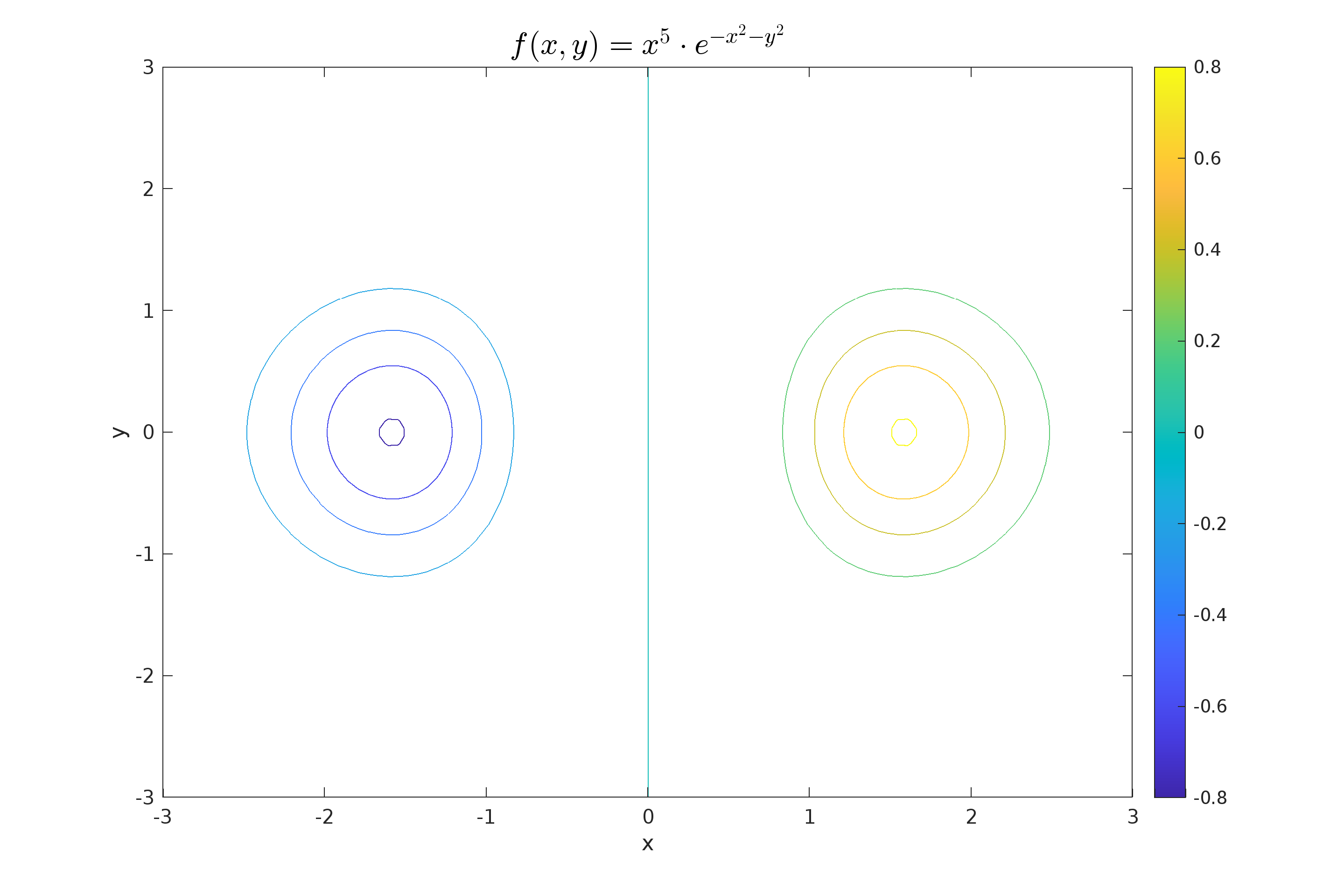
Για να πάρουμε μια καλύτερη αίσθηση για το που βρίσκονται αυτά τα τοπικά ακρότατα, παρακάτω παραθέτουμε ένα γράφημα με τις ισοβαρείς καμπύλες της $f$.
\InsertFigure{H}{0.8}{fig:plotContour}{../scripts/figures/FunctionContour.png}{Ισοβαρείς της f}
\InsertFigure{H}{0.8}{fig:plotContour}{../scripts/figures/Plot_Contour.png}{Ισοβαρείς της f}
Από το παραπάνω σχήμα \ref{fig:plotContour} φαίνεται ότι το ελάχιστο της f βρίσκεται στο αρνητικό ημιεπίπεδο των χ, κοντά στο $y = 0$
\par
@@ -116,10 +124,10 @@
Πριν προχωρήσουμε στα επόμενα θέματα της εργασίας και στην ανάλυση των μεθόδων υπολογισμού του ελάχιστου, θέλουμε να αναφερθούμε στις διαφορετικές τεχνικές επιλογής βήματος $\gamma_k$ και ειδικότερα για αυτή της ελαχιστοποίησης της $f(x_k + \gamma_k d_k)$ και την Armijo.
\subsection{Ελαχιστοποίηση της $f(x_k + \gamma_k d_k)$}
Η μέθοδος αυτή αναζητά την τιμή $\gamma_k$ που ελαχιστοποιεί την τιμή της συνάρτησης κατά μήκος της κατεύθυνσης $d_k$.
Η μέθοδος αυτή αναζητά την τιμή $\gamma_k$ που ελαχιστοποιεί την τιμή της συνάρτησης κατά μήκος της κατεύθυνσης $d_k$ (αρχείο: \textbf{gamma\_minimized.m}).
\item Η αρνητική κλίση $-\nabla f(x_k)$ (Steepest Descent).
@@ -130,127 +138,195 @@
Στα μειονεκτήματα μπορούμε να αναφέρουμε το \textbf{υπολογιστικό κόστος}, καθώς ο υπολογισμός του $\gamma_k$ απαιτεί πολλαπλές αξιολογήσεις της $f(x)$.
\subsection{Armijo rule}
Η Armijo rule είναι μια προσαρμοστική τεχνική που επιλέγει το $\gamma_k$ για να εξασφαλίσει επαρκή μείωση της συνάρτησης.
Η Armijo rule είναι μια προσαρμοστική τεχνική που επιλέγει το $\gamma_k$ για να εξασφαλίσει επαρκή μείωση της συνάρτησης (αρχείο: \textbf{gamma\_armijo.m}).
Η βασική ιδέα είναι ότι η συνάρτηση πρέπει να μειώνεται "αρκετά" σε κάθε βήμα, χωρίς να χρειάζεται να υπολογίζεται το ακριβές ελάχιστο.
Όπου $\sigma \in (0, 0.1)$ είναι μια σταθερά (τυπικά $\sigma = 0.1$) και $\gamma_k$ αρχικά να ορίζεται ως 1 και να μειώνεται προοδευτικά (π.χ., $\gamma_k = \beta \cdot \gamma_k$) έως ότου ικανοποιηθεί η συνθήκη.
\unboldmath
\par
Πλεονεκτήματα της μεθόδου είναι η \textbf{σταθερότητα}, καθώς αποτρέπει πολύ μεγάλα βήματα που μπορεί να αυξήσουν την τιμή της $f(x)$, αλλά και η \textbf{ανθεκτικότητα}, καθώς λειτουργεί καλά ακόμα και όταν η $f(x)$ δεν συμπεριφέρεται πολύ καλά.
Στα μειονεκτήματα μπορούμε να αναφέρουμε την \textbf{εξάρτησή της από τις παραμέτρους} \boldmath $\sigma$ και $\beta$\unboldmath, μια κακή επιλογή των οποίων μπορεί να οδηγήσει σε αργή σύγκλιση.
Η πρώτη μέθοδος που χρησιμοποιούμε στην εργασία (Θέμα 2), είναι η μέθοδος μέγιστης καθόδου.
\section{Μέθοδος Μέγιστης Καθόδου - Θέμα 2}
Η πρώτη μέθοδος που χρησιμοποιούμε στην εργασία, είναι η μέθοδος μέγιστης καθόδου (Steepest descent) (αρχείο: \textbf{method\_steepest\_descent.m}).
Είναι μια μέθοδος πρώτης τάξης που χρησιμοποιεί την κατεύθυνση της αρνητικής κλίσης $\nabla f(x,y)$ της $f$ ως κατεύθυνση καθόδου.
Η μέθοδος θεωρείται βασική και συχνά χρησιμοποιείται ως εισαγωγή στις μεθόδους βελτιστοποίησης.
\par
Η μέθοδος επιλέγει την κατεύθυνση $d_k = -\nabla f(x_k)$, η οποία είναι η κατεύθυνση της μέγιστης τοπικής μείωσης της συνάρτησης.
Στη συνέχεια, υπολογίζεται το βήμα $\gamma_k$ για να βρεθεί το επόμενο σημείο $x_{k+1} = x_k + \gamma_k d_k$.
Για να χρησιμοποιήσουμε τη μέθοδο, η συνάρτηση $f$ \textbf{πρέπει να είναι συνεχής και διαφορίσιμη} και η κλίση $\nabla f$ να είναι υπολογίσιμη.
Επίσης για την εφαρμογή της μεθόδου το αρχικό σημείο θα πρέπει να \textbf{μην είναι ακρότατο} της $f$, δηλαδή \boldmath$\nabla f(x_0) \neq 0$\unboldmath.
\par
Επίσης για την εφαρμογή της μεθόδου, για το αρχικό σημείο θα πρέπει \boldmath$\nabla f(x_0) \neq 0$\unboldmath.
Όλοι οι υπολογισμοί και τα διαγράμματα για τη μέθοδο βρίσκονται στο αρχείο \textbf{Script\_2\_Steepest\_descent.m}
\subsection{Σημείο εκκίνησης (0,0)}
Για το σημείο (0, 0) η κλίση της $f$ είναι: $\nabla f(0,0) = \begin{bmatrix} 0 \\ 0 \end{bmatrix}$, με αποτέλεσμα η μέθοδος να μην μπορεί να εφαρμοστεί για κανένα τρόπο υπολογισμού βήματος.
\subsection{Σημείο εκκίνησης (-1,1)}
Για το σημείο (-1, 1) η τιμή της $f$ είναι: $f(-1, 1) = -0.135335$ και το διάνυσμα της κλίσης: $\nabla f(0,0) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$, επομένως μπορούμε να εφαρμόσουμε τη μέθοδο.
Για το σημείο (-1, 1) η τιμή της $f$ είναι: $f(-1, 1) = -0.1353$ και το διάνυσμα της κλίσης: $\nabla f(0,0) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$, επομένως μπορούμε να εφαρμόσουμε τη μέθοδο.
\par
\underline{Σταθερό βήμα} \\
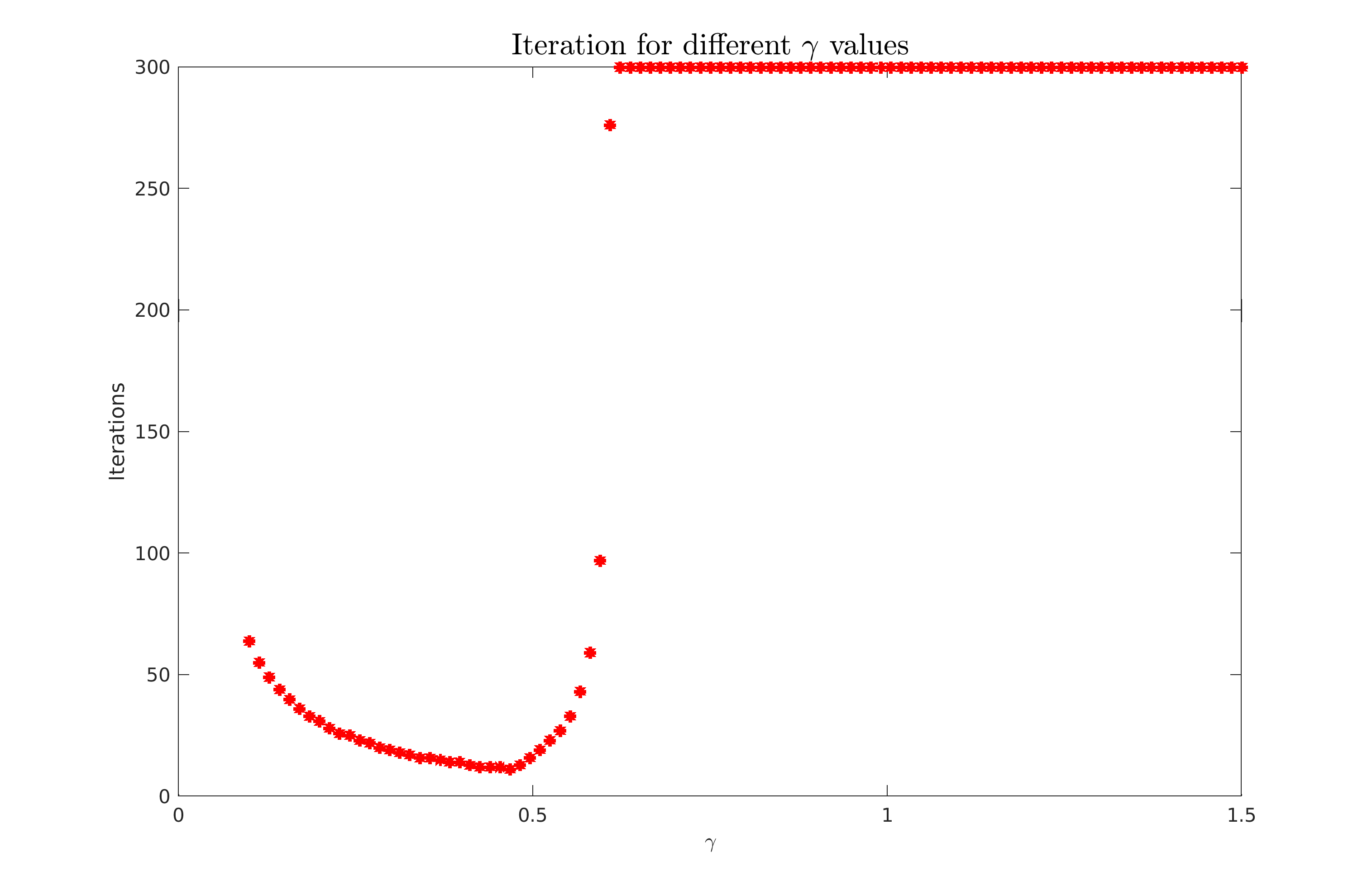
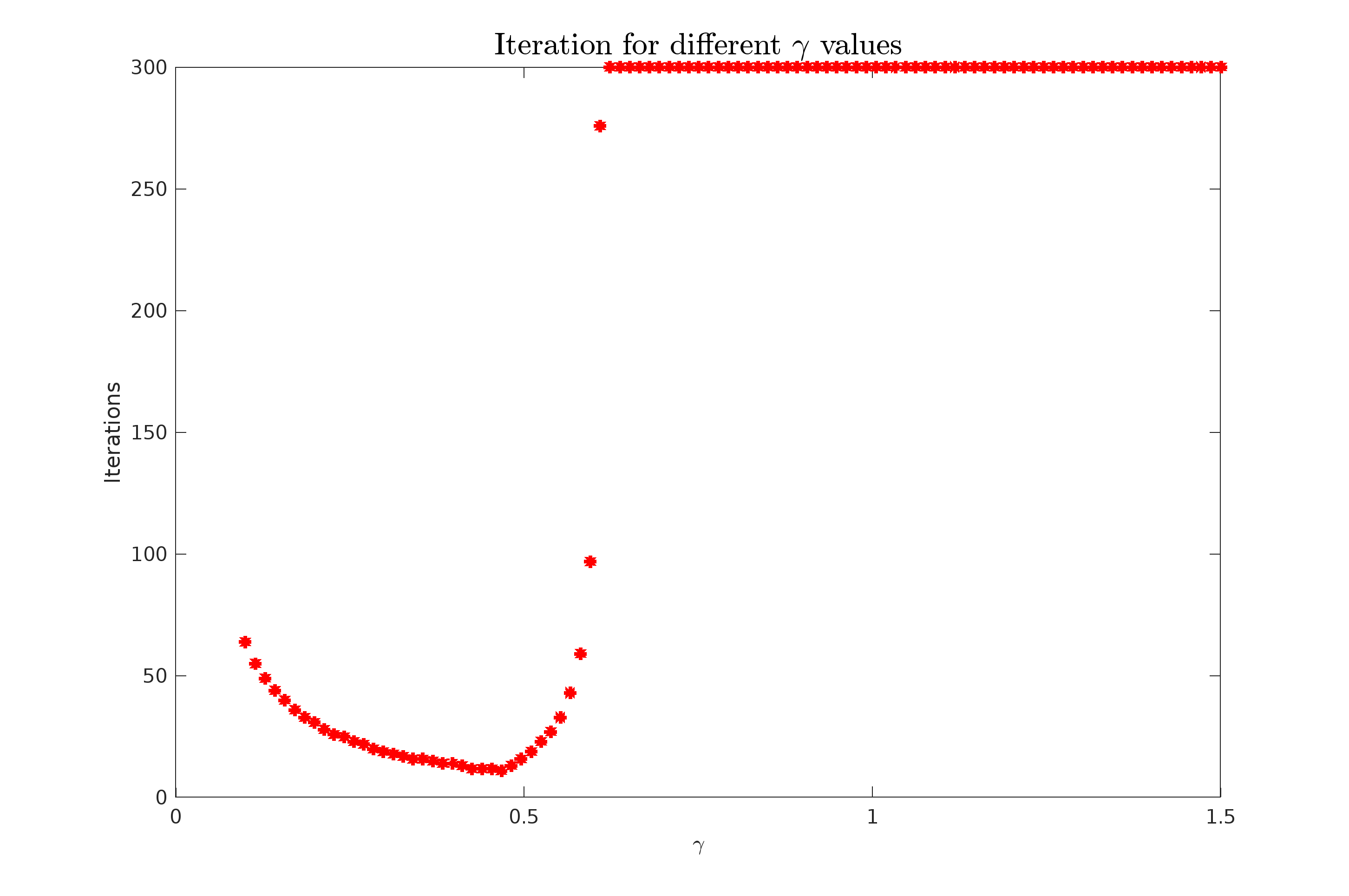
Επιλέγοντας ακρίβεια $\epsilon = 0.0001$, εκτελούμε την μέθοδο \textit{method\_steepest\_descent()} και υπολογίζουμε τον αριθμό επαναλήψεων για διαφορετικές τιμές $\gamma_k$.
\InsertFigure{H}{0.8}{fig:point2ItersOverGamma}{../scripts/figures/StDes_Iter_o_gamma_2.png}{Αριθμός επαναλήψεων για διαφορετικές τιμές $\gamma_k$ [Μέγιστη Κάθοδος].}
\InsertFigure{H}{0.8}{fig:StDes_Iter_o_gamma_2}{../scripts/figures/StDes_Iter_o_gamma_2.png}{Αριθμός επαναλήψεων για διαφορετικές τιμές $\gamma_k$ [Μέγιστη Κάθοδος].}
Στο παραπάνω σχήμα \ref{fig:point2ItersOverGamma} παρατηρούμε ότι για τιμές του $\gamma_k > 0.61$ η μέθοδος αποκλίνει.
Στο παραπάνω σχήμα \ref{fig:StDes_Iter_o_gamma_2} παρατηρούμε ότι για τιμές του $\gamma_k > 0.61$ η μέθοδος αποκλίνει.
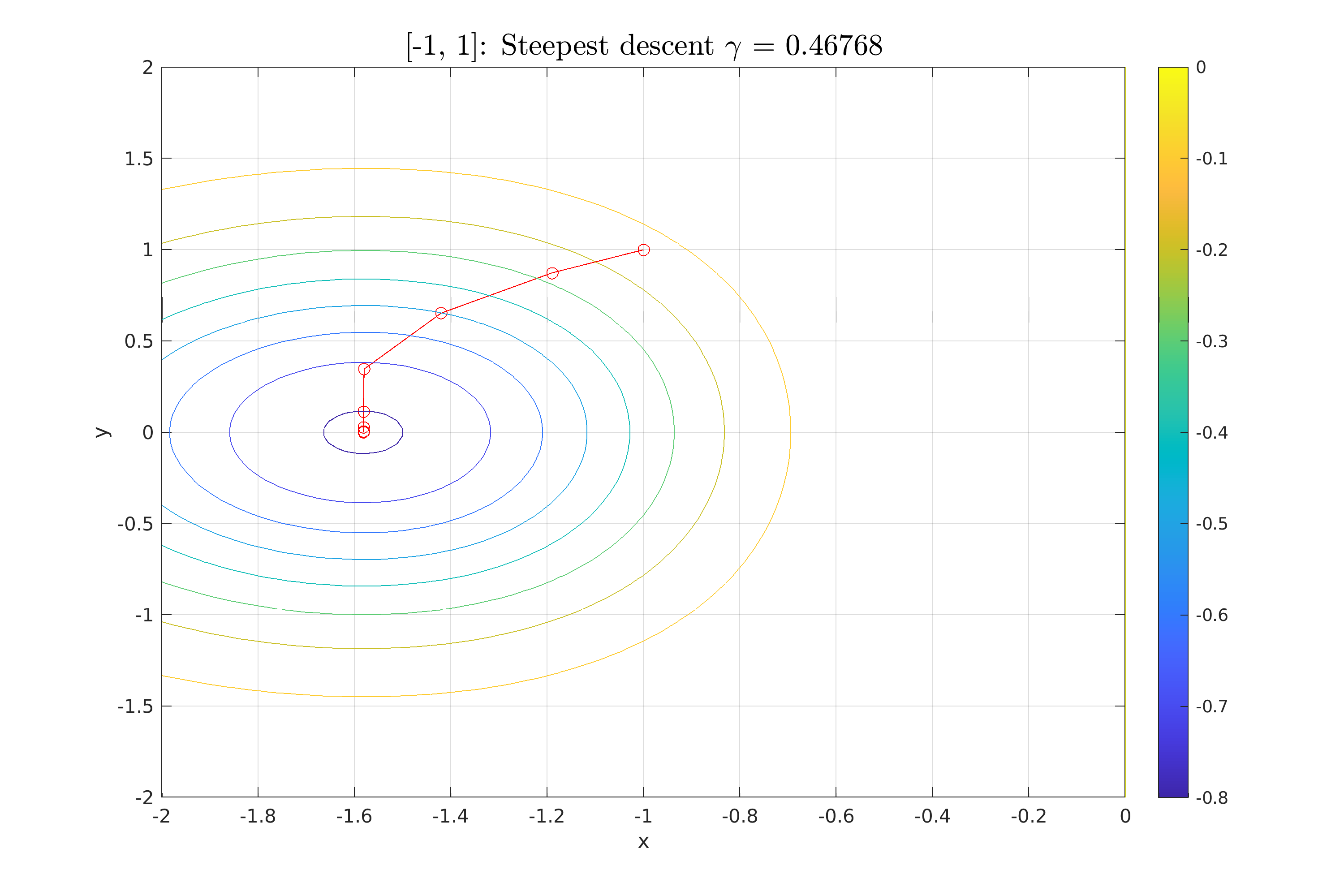
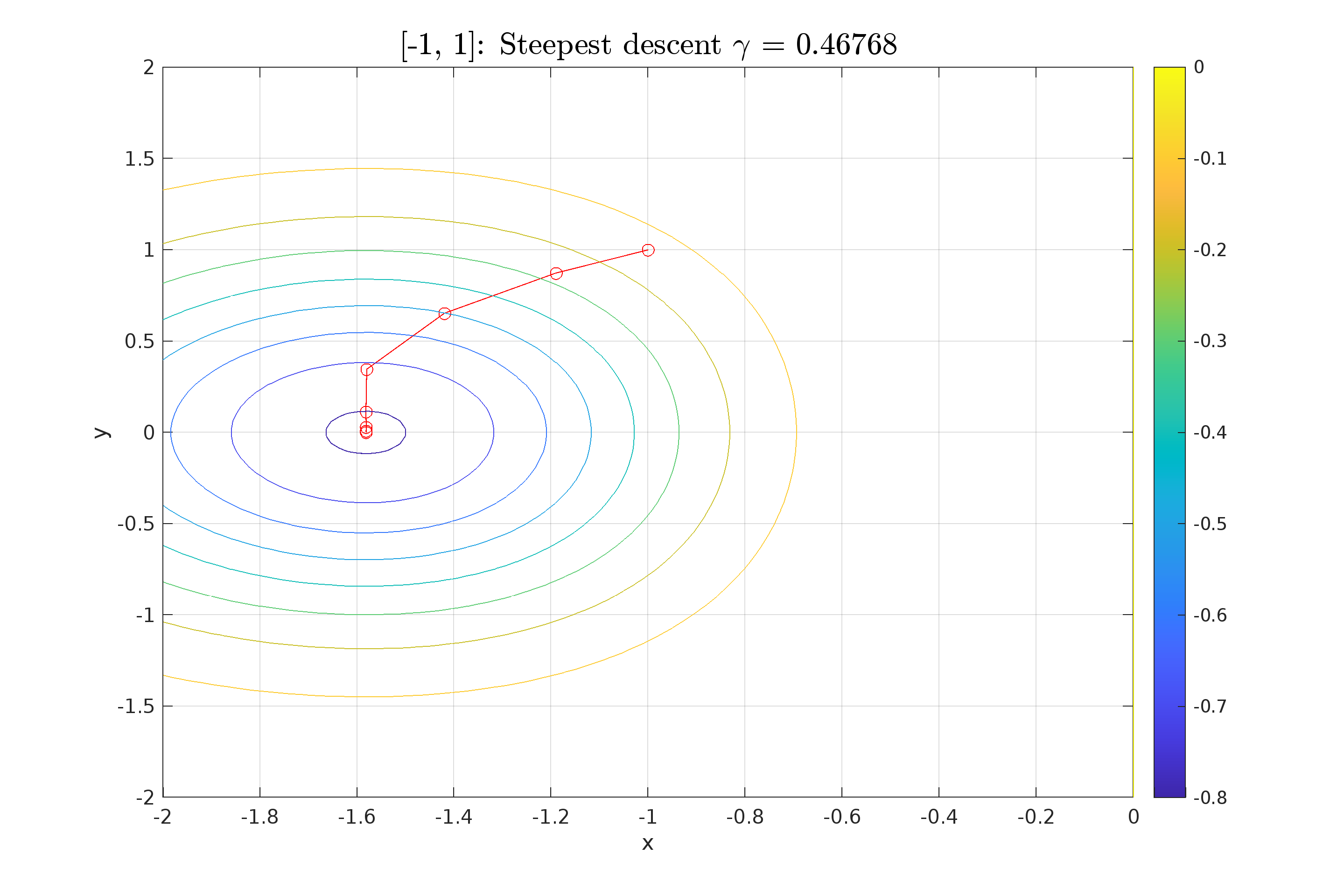
Από την παραπάνω διαδικασία επίσης υπολογίζουμε το $\gamma_k = 0,46768$ για το οποίο η μέθοδος συγκλίνει με τα λιγότερα βήματα.
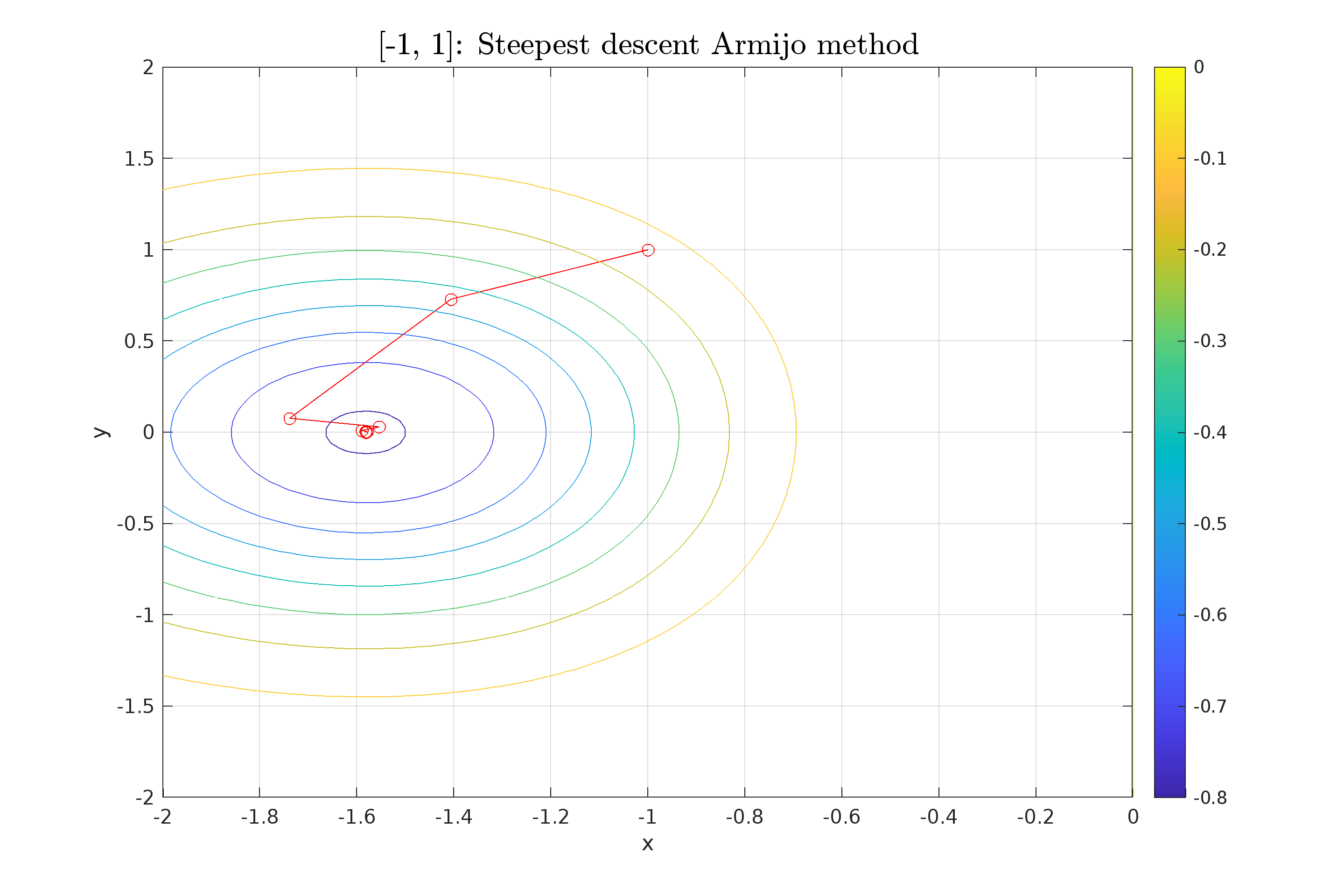
Στο παρακάτω σχήμα \ref{fig:StDes_fixed_2} αναπαριστούμε την πορεία των σημείων καθώς συγκλίνουν στο ελάχιστο.
\InsertFigure{H}{0.8}{fig:StDes_fixed_2}{../scripts/figures/StDes_fixed_2.png}{Σύγκλιση της μεθόδου Steepest descent [fixed $\gamma_k$].}
\par
\underline{Ελαχιστοποίηση της $f(x_k + \gamma_k d_k$)} \\
Για την ελαχιστοποίηση της $f$, χρησιμοποιήθηκε η bisection από την προηγούμενη εργασία, η οποία τροποποιήθηκε ώστε δέχεται functions και όχι symbolic expressions.
\InsertFigure{H}{0.8}{fig:StDes_minimized_2}{../scripts/figures/StDes_minimized_2.png}{Σύγκλιση της μεθόδου Steepest descent [minimized f].}
Από το γράφημα φαίνεται τόσο ότι η μέθοδος συγκλίνει κοντά στο ελάχιστο γρηγορότερα, όσο και ότι πραγματοποιεί “διορθώσεις πορείας”.
\par
\underline{Armijo rule} \\
Για τη μέθοδο η βασική ιδέα είναι να ξεκινήσει ο αλγόριθμος από ένα μεγάλο $\gamma_k = 1$ και συνεχώς να μειώνεται με βάση τον κανόνα Armijo.
Μετά από ένα tuning των παραμέτρων της μεθόδου καταλήξαμε στα $\beta=0.4, \sigma=0.1$
\InsertFigure{H}{0.8}{fig:StDes_armijo_2}{../scripts/figures/StDes_armijo_2.png}{Σύγκλιση της μεθόδου Steepest descent [armijo rule].}
\par
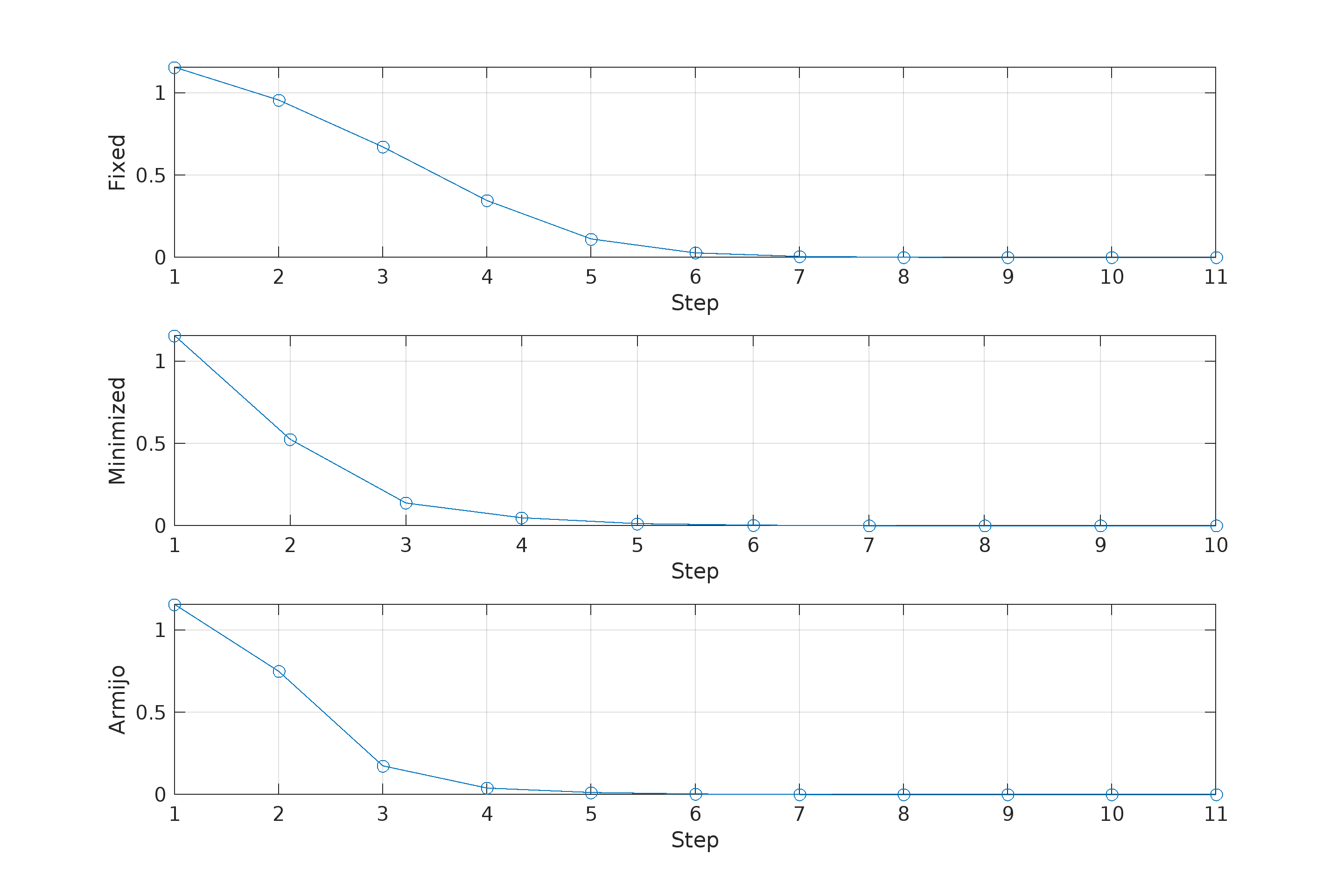
\underline{Σύγκριση} \\
Στο παρακάτω διάγραμμα φαίνονται τα βήματα αλλά ο ρυθμός σύγκλισης της κάθε μεθόδου.
\InsertFigure{H}{0.8}{fig:StDes_compare_2}{../scripts/figures/StDes_compare_2.png}{Ευκλείδεια απόσταση από το ελάχιστο για κάθε μέθοδο υπολογισμού $\gamma_k$ [Steepest descent].}
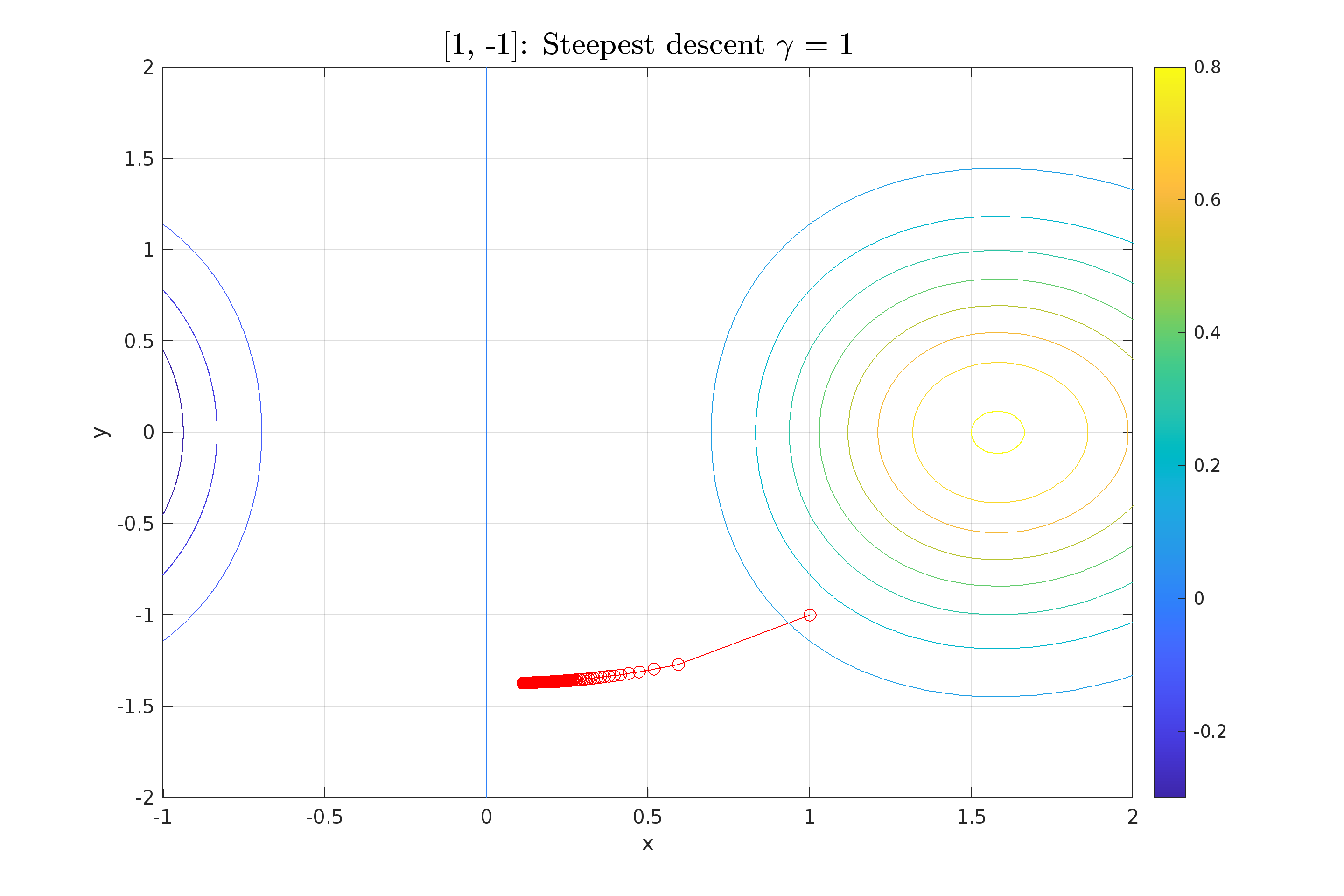
\subsection{Σημείο εκκίνησης (1,-1)}
Για το σημείο (1, -1) η τιμή της $f$ είναι: $f(1, -1) = -0.135335$ και το διάνυσμα της κλίσης: $\nabla f(0,0) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$, επομένως μπορούμε να εφαρμόσουμε τη μέθοδο.
Για το σημείο (1, -1) η τιμή της $f$ είναι: $f(1, -1) = -0.1353$ και το διάνυσμα της κλίσης: $\nabla f(0,0) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$, επομένως μπορούμε να εφαρμόσουμε τη μέθοδο.
\par
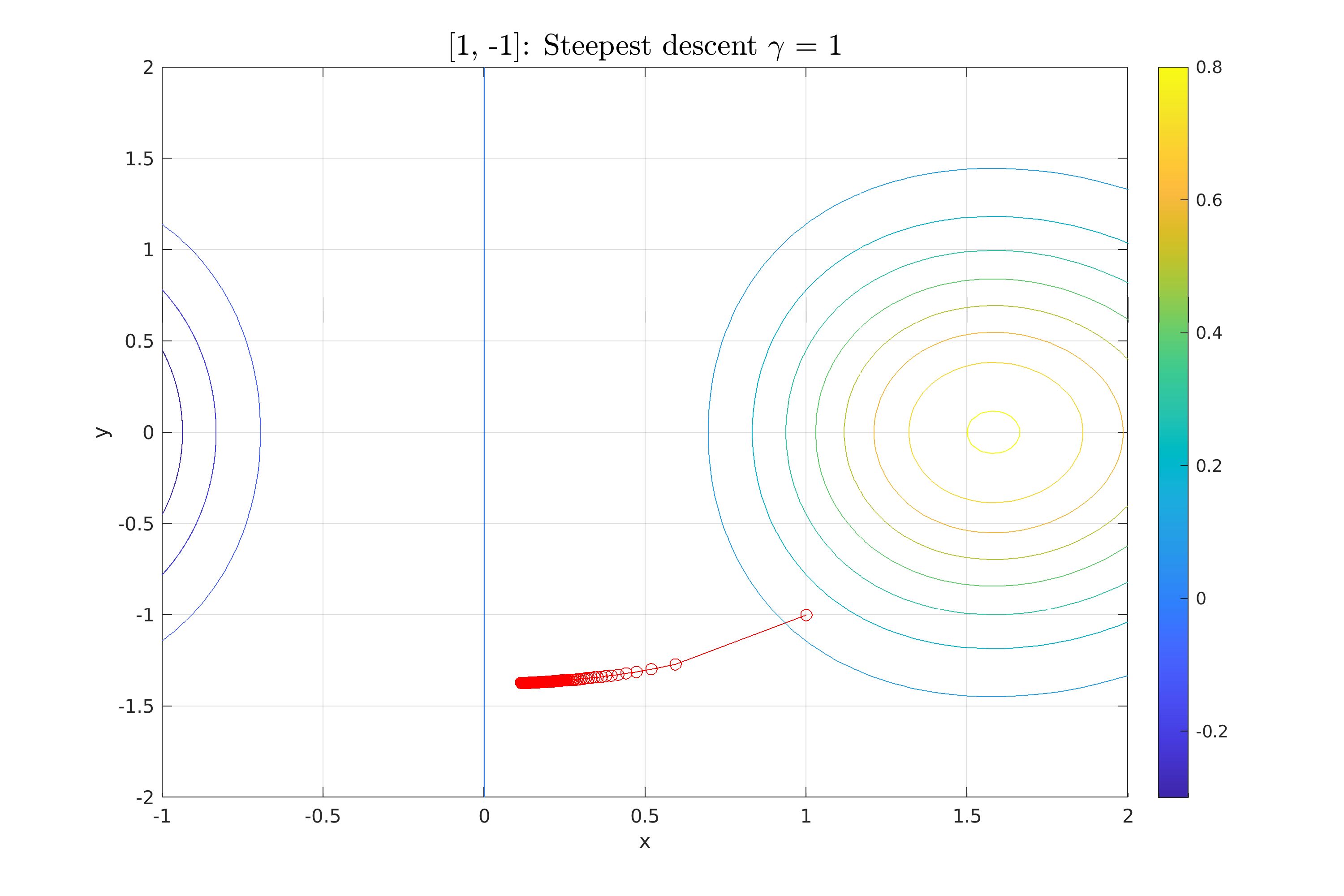
\underline{Σταθερό βήμα} \\
Για σταθερό βήμα εκτελέσαμε διαδοχικά τη μέθοδο \textit{method\_steepest\_descent()} για να υπολογίσουμε τον αριθμό επαναλήψεων για διαφορετικές τιμές $\gamma_k$, όμως σε καμία τιμή ο αλγόριθμος δεν συγκλίνει.
Ακόμα και για μεγάλες τιμές του $\gamma_k$, ο αλγόριθμος εγκλωβίζεται στο δεξιό ημιεπίπεδο.
Για σταθερό βήμα εκτελέσαμε διαδοχικά τη μέθοδο \textit{method\_steepest\_descent()} για να υπολογίσουμε τον αριθμό επαναλήψεων για διαφορετικές τιμές $\gamma_k$, όμως σε καμία τιμή ο αλγόριθμος δεν καταφέρνει να συγκλίνει.
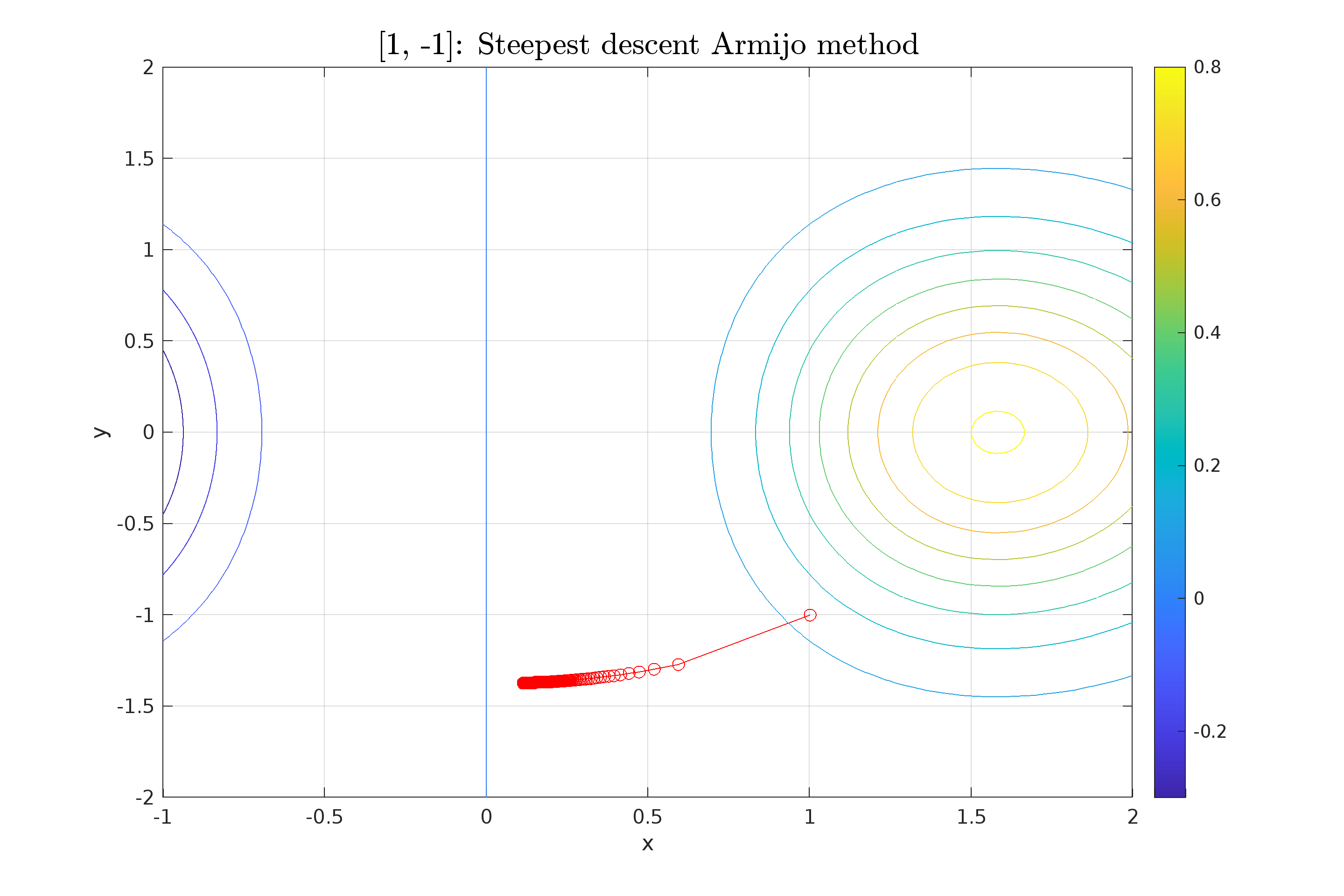
Ακόμα και για μεγάλες τιμές βήματος, όπως για παράδειγμα $\gamma_k = 1$, ο αλγόριθμος εγκλωβίζεται στο δεξιό ημιεπίπεδο, όπως φαίνεται και στο διάγραμμα \ref{fig:StDes_fixed_3} παρακάτω.
\InsertFigure{H}{0.8}{fig:StDes_fixed_3}{../scripts/figures/StDes_fixed_3.png}{Μη σύγκλιση της μεθόδου Steepest descent [Fixed step].}
\par
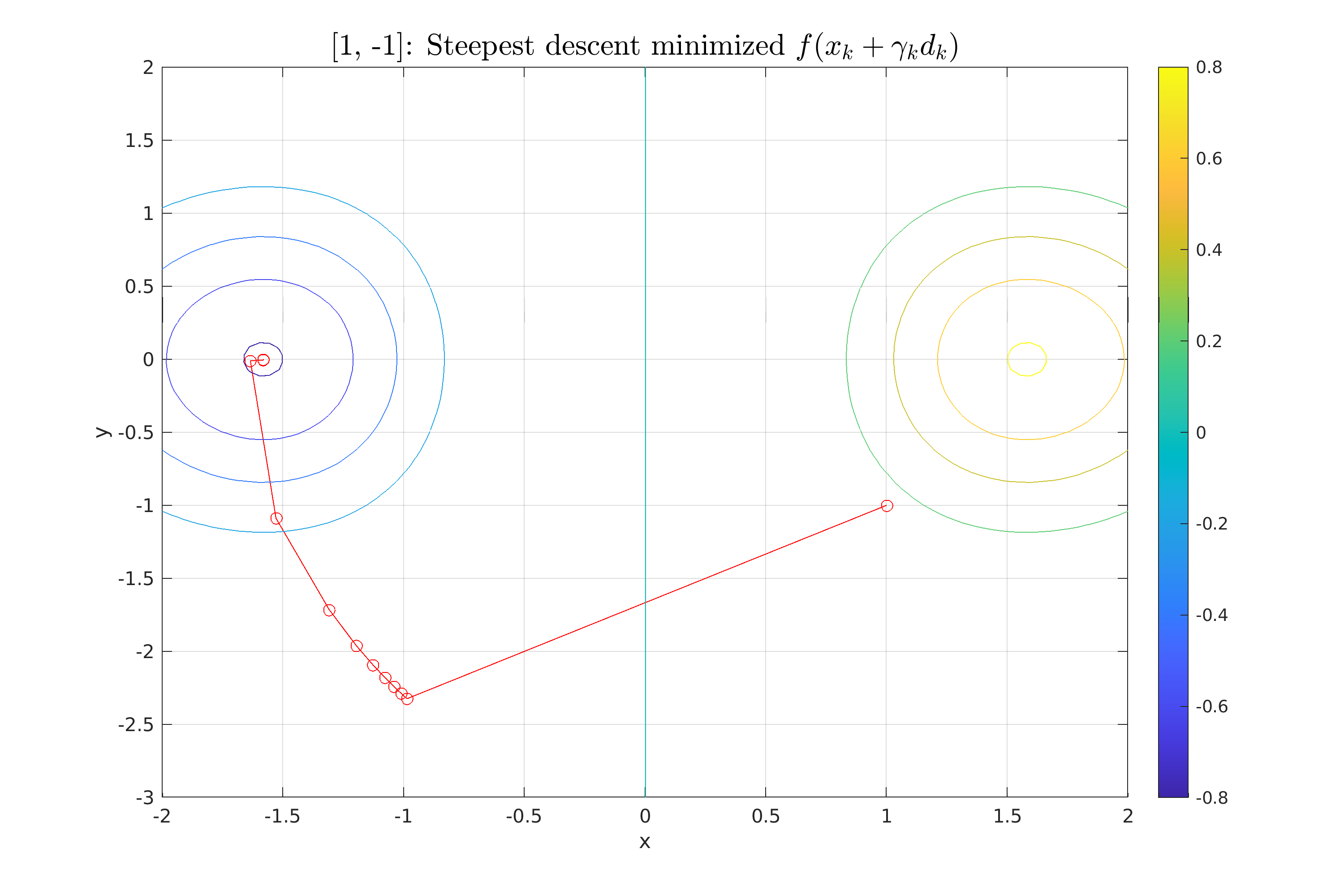
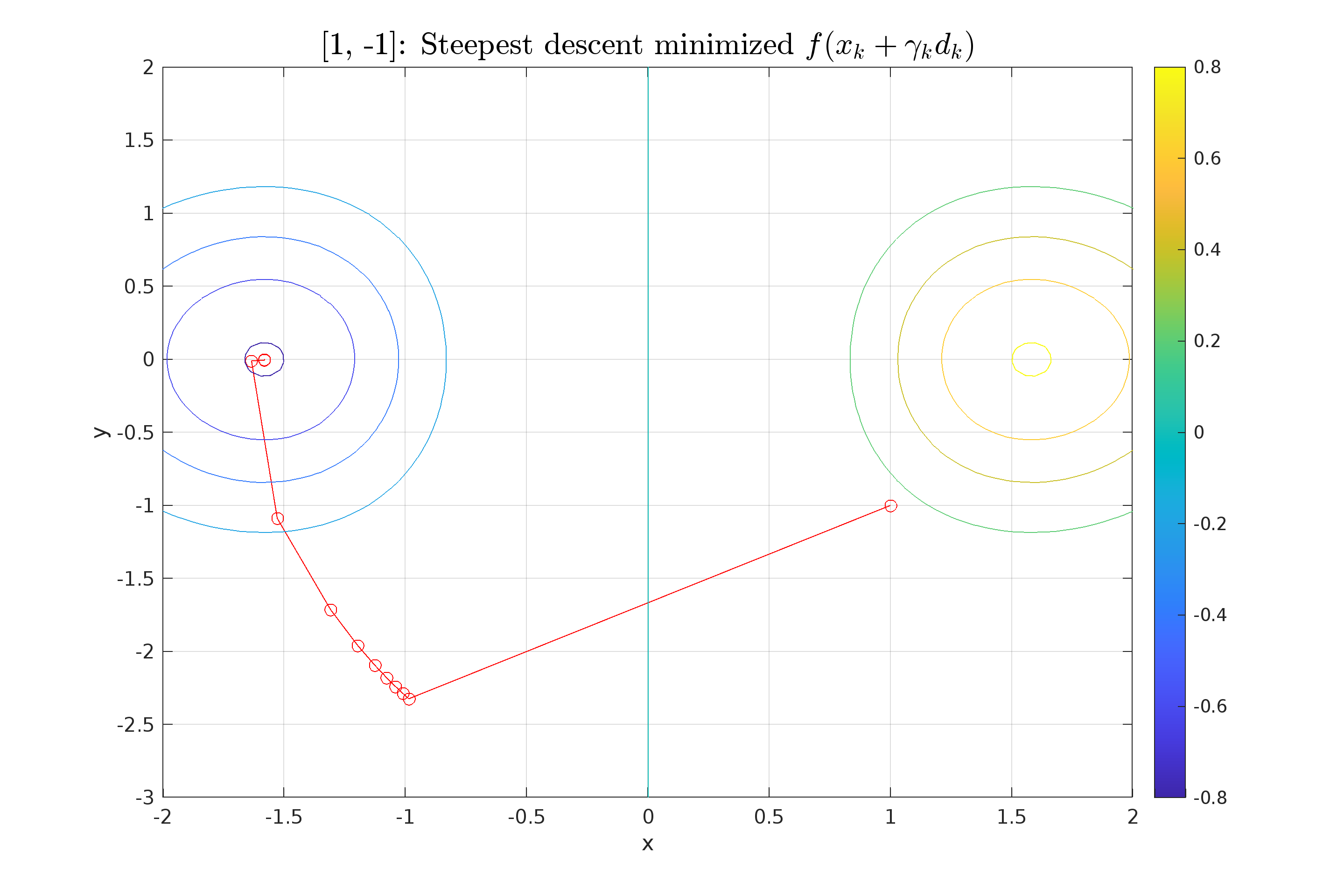
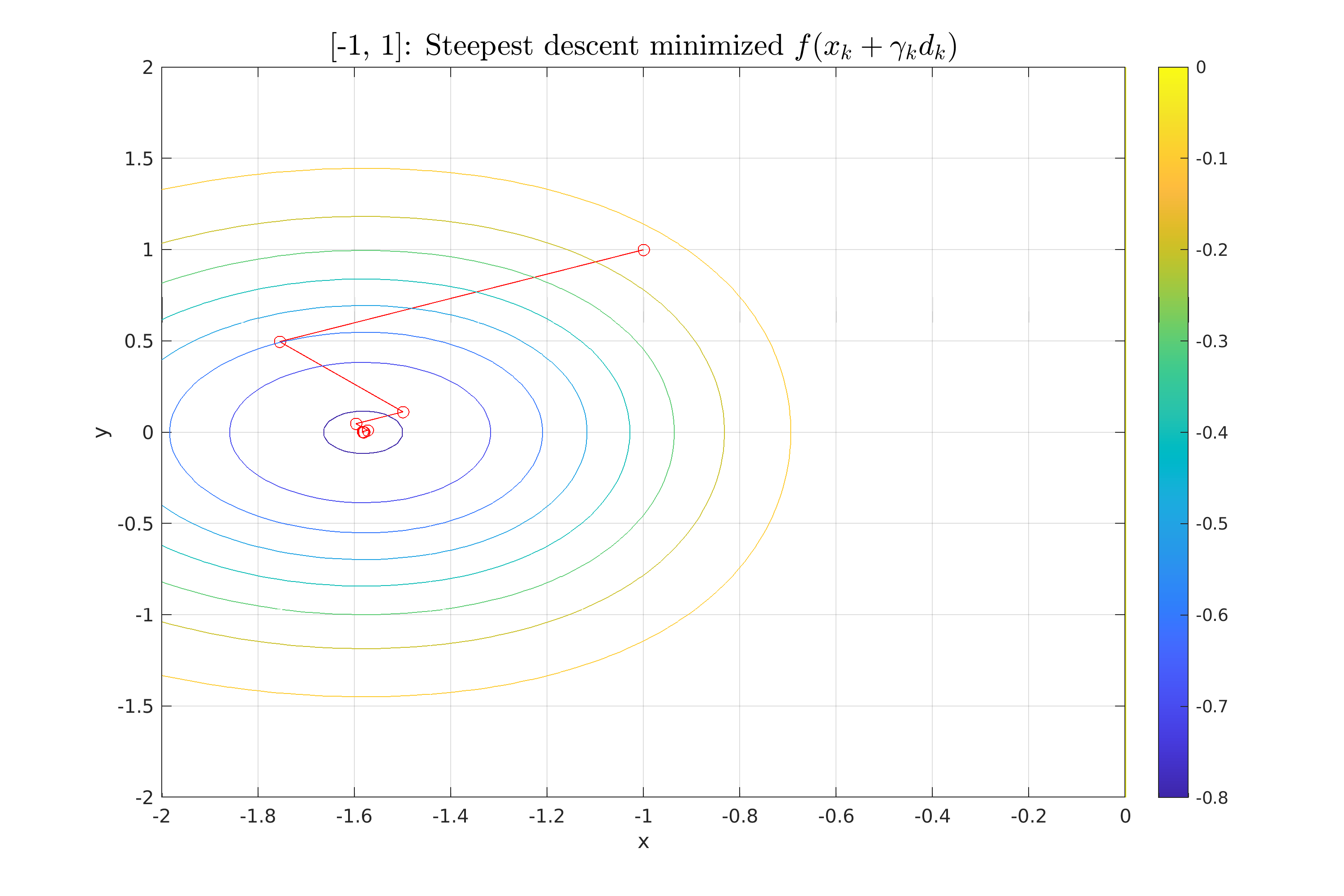
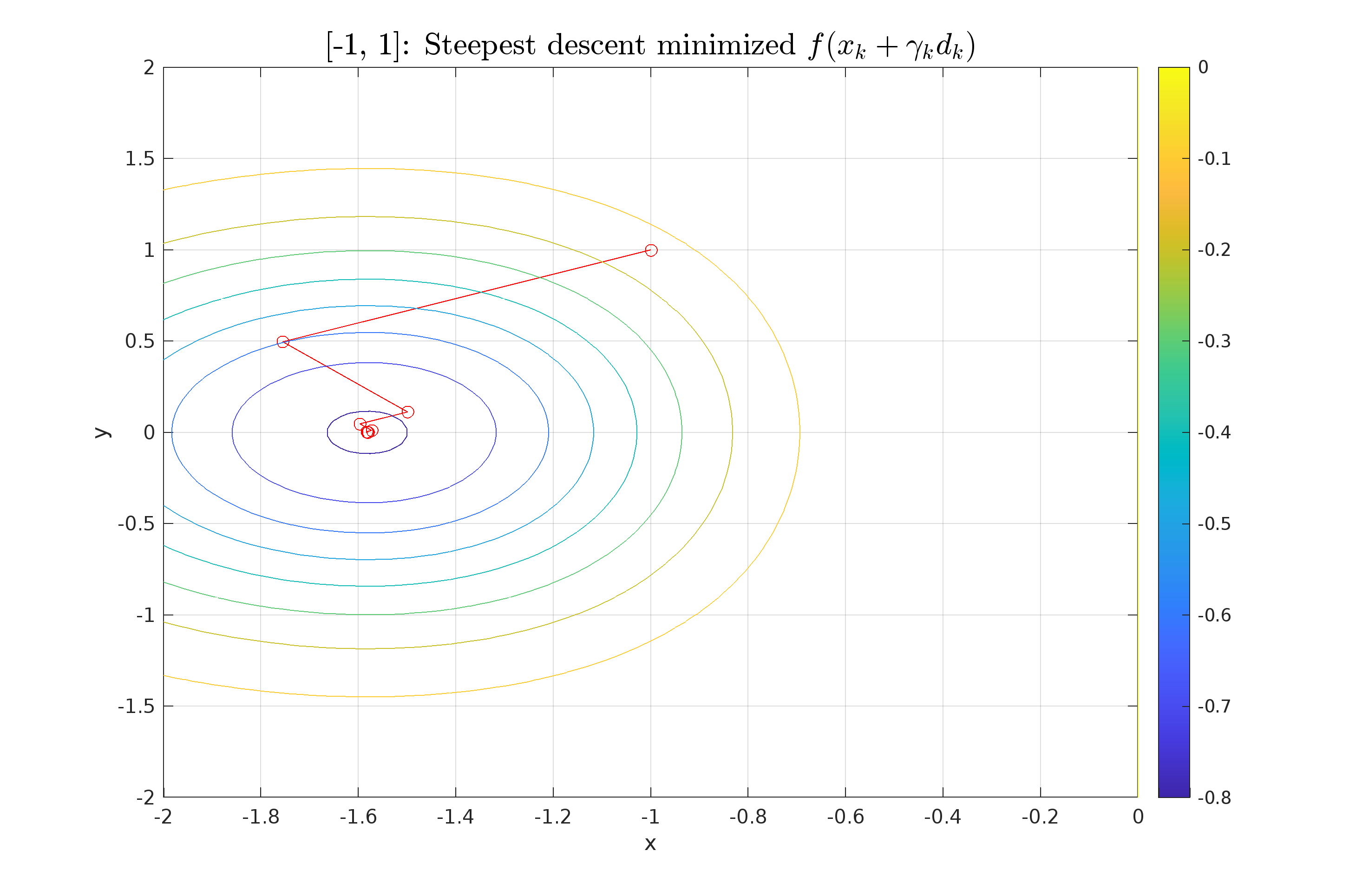
\underline{Ελαχιστοποίηση της $f(x_k + \gamma_k d_k$)} \\
\InsertFigure{H}{0.8}{fig:StDes_minimized_3}{../scripts/figures/StDes_minimized_3.png}{Σύγκλιση της μεθόδου Steepest descent [minimized f].}
Από το γράφημα φαίνεται ότι η μέθοδος συγκλίνει, καταφέρνοντας να περάσει την περιοχή με μηδενικές κλίσεις κοντά στον άξονα των $\psi$.
Για υπολογισμό βήματος ελαχιστοποιώντας τη $f(x_k + \gamma_k d_k)$, όπως φαίνεται και από το γράφημα \ref{fig:StDes_minimized_3}, η μέθοδος συγκλίνει, καταφέρνοντας να περάσει την περιοχή με μηδενικές κλίσεις κοντά στον άξονα των y.
\par
\underline{Armijo rule} \\
\InsertFigure{H}{0.8}{fig:StDes_armijo_3}{../scripts/figures/StDes_armijo_3.png}{Μη σύγκλιση της μεθόδου Steepest descent [armijo rule].}
Αντίθετα η μέθοδος armijo δεν συγκλίνει, καθώς εγκλωβίζεται στο δεξιό ημιεπίπεδο.
Αντίθετα η μέθοδος armijo δεν συγκλίνει, καθώς και αυτή εγκλωβίζεται στο δεξιό ημιεπίπεδο.
\section{Μέθοδος Newton}
Η δεύτερη μέθοδος που χρησιμοποιούμε στην εργασία (Θέμα 3), είναι η μέθοδος Newton.
Η μέθοδος χρησιμοποιεί πληροφορίες δεύτερης τάξης (Hessian) για τη βελτίωση της κατεύθυνσης καθόδου.
Αν η συνάρτηση είναι τετραγωνική, η μέθοδος συγκλίνει σε ένα βήμα.
\section{Μέθοδος Newton - Θέμα 3}
Η δεύτερη μέθοδος που χρησιμοποιούμε στην εργασία, είναι η μέθοδος Newton (αρχείο: \textbf{method\_newton.m}).
Η μέθοδος χρησιμοποιεί πληροφορίες δεύτερης τάξης (Εσσιανό - Hessian) για τη βελτίωση της κατεύθυνσης καθόδου.
Για να λειτουργήσει η μέθοδος η $f$ πρέπει να είναι \textbf{δύο φορές διαφορίσιμη} και ο Εσσιανός \boldmath$H_k$\unboldmath να είναι \textbf{θετικά ορισμένος και αντιστρέψιμος}.
Ο υπολογισμός βήματος γίνεται παλι είτε με σταθερό βήμα, είτε με ελαχιστοποίηση της $f(x_k + \gamma_k d_k)$, είτε με τον κανόνα armijo.
Για να λειτουργήσει η μέθοδος, η $f$ πρέπει να είναι \textbf{δύο φορές διαφορίσιμη} και ο Εσσιανός \boldmath$H_k$\unboldmath να είναι \textbf{θετικά ορισμένος και αντιστρέψιμος}.
\par
Στα πλεονεκτήματα της μεθόδου είναι η \textbf{ταχύτερη σύγκλιση} από την Steepest Descent για κυρτές συναρτήσεις και το γεγονός ότι εκμεταλλεύεται την \textbf{πληροφορία καμπυλότητας} της συνάρτησης.
Όμως είναι υπολογιστικά δαπανηρή και δεν είναι ανθεκτική σε μη κυρτές συναρτήσεις ή σε περιπτώσεις όπου ο Εσσιανός είναι κακώς ορισμένος.
Όλοι οι υπολογισμοί για τη μέθοδο βρίσκονται στο αρχείο \textbf{Script\_3\_Newton.m}
\subsection{Σημείο εκκίνησης (0,0)}
Για το σημείο $x_k = (0, 0)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0 \\ 0 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix}$ με αποτέλεσμα η μέθοδος και εδώ να μην μπορεί να εφαρμοστεί για κανένα τρόπο υπολογισμού βήματος.
\subsection{Σημείο εκκίνησης (-1,1)}
Για το σημείο $x_k = (-1, 1)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0.406 \\ 0.270 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} -0.270 & -0.812 \\ -0.812 & -0.270 \end{bmatrix}$ με ιδιοτιμές $\lambda = \begin{bmatrix} -1.082 \\ 0.541 \end{bmatrix}$.
Για το σημείο $x_k = (-1, 1)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} -0.2707 & -0.8120 \\ -0.8120 & -0.2707 \end{bmatrix}$ με ιδιοτιμές $\lambda = \begin{bmatrix} -1.0827 \\ 0.5413 \end{bmatrix}$.
Από τα παραπάνω προκύπτει πως ο Εσσιανός είναι αόριστος και άρα δεν μπορεί να εφαρμοστεί η μέθοδος, για κανένα τρόπο υπολογισμού βήματος.
\subsection{Σημείο εκκίνησης (1,-1)}
Για το σημείο $x_k = (1, -1)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0.406 \\ 0.270 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} 0.270 & 0.812 \\ 0.812 & 0.270 \end{bmatrix}$ με ιδιοτιμές $\lambda = \begin{bmatrix} -0.541 \\ 1.082 \end{bmatrix}$.
Για το σημείο $x_k = (1, -1)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} 0.2707 & 0.8120 \\ 0.8120 & 0.2707 \end{bmatrix}$ με ιδιοτιμές $\lambda = \begin{bmatrix} -0.5413 \\ 1.0827 \end{bmatrix}$.
Και εδώ, από τα παραπάνω προκύπτει πως ο Εσσιανός είναι αόριστος και άρα δεν μπορεί να εφαρμοστεί η μέθοδος, για κανένα τρόπο υπολογισμού βήματος.
\section{Μέθοδος Levenberg-Marquardt}
Η τελευταία μέθοδος που χρησιμοποιούμε στην εργασία (Θέμα 4), είναι η μέθοδος Levenberg-Marquardt.
\section{Μέθοδος Levenberg-Marquardt - Θέμα 4}
Η τελευταία μέθοδος που χρησιμοποιούμε στην εργασία, είναι η μέθοδος Levenberg-Marquardt (αρχείο: \textbf{method\_lev\_mar.m}).
Πρόκειται για μια τροποποιημένη έκδοση της μεθόδου Newton, η οποία εισάγει έναν παράγοντα απόσβεσης για τη σταθεροποίηση όταν ο εσσιανός δεν είναι θετικά ορισμένος.
Για το λόγο αυτό χρησιμοποιεί ένας προσαρμοσμένος εσσιανός $H_k' = H_k + \mu_k I$, όπου $\mu_k > 0$ ένας παράγοντας απόσβεσης.
Για μεγάλες τιμές του $\mu_k$ η μέθοδος συμπεριφέρεται σαν Gradient Descent.
%Απαιτήσεις:
%Η f(x)f(x) πρέπει να είναι δύο φορές διαφορίσιμη.
%Υπολογισμός του λλ απαιτεί προσεκτική επιλογή παραμέτρων.
%Περιορισμοί:
%Η απόδοση εξαρτάται από την επιλογή του αρχικού λλ.
%Μπορεί να παρουσιάσει αργή σύγκλιση σε προβλήματα χωρίς κυρτότητα.
%Πλεονεκτήματα:
%Σταθερή ακόμη και για κακώς ορισμένα Hessians.
%Λειτουργεί καλά σε προβλήματα που συνδυάζουν γραμμικές και μη γραμμικές εξαρτήσεις.
%Μειονεκτήματα:
%Υψηλότερο υπολογιστικό κόστος σε σχέση με το Steepest Descent.
\boldmath
Για το λόγο αυτό χρησιμοποιείται ένας προσαρμοσμένος εσσιανός $H_k' = H_k + \mu_k I$, όπου $\mu_k > 0$ ένας παράγοντας, τέτοιος ώστε ο $H_k'$ να είναι θετικά ορισμένος.
Έτσι σε κάθε βήμα, γίνεται έλεγχος των ιδιοτιμών του εσσιανού.
Αν υπάρχει ιδιοτιμή μικρότερη ή ίση με το 0, τότε υπολογίζεται ο παράγοντας \[\mu_k = \abs{\min\{\lambda(H_k)\}} + \epsilon \]
Όπου $\epsilon > 0$ ένας παράγοντας προσαύξησης ώστε να βεβαιωθούμε πως ο παραγόμενος προσαρμοσμένος Εσσιανός $H_k' = H_k + \mu_k I$ είναι θετικά ορισμένος και δεν έχει κάποια μηδενική ιδιοτιμή.
\unboldmath
Να σημειώσουμε εδώ πως για μεγάλες τιμές του $\mu_k$ η μέθοδος συμπεριφέρεται σαν Gradient Descent, ενώ για μικρές προσεγγίζει τη μέθοδο Newton.
\par
Για να λειτουργήσει η μέθοδος, η $f$ πρέπει να είναι \textbf{δύο φορές διαφορίσιμη}.
Επίσης σημαντικό ρόλο στην ευστάθεια της μεθόδου παίζει η επιλογή το $\epsilon$ και άρα κατ' επέκταση και του $\mu_k$.
Στα πλεονεκτήματα της μεθόδου έχουμε την σταθερότητα ακόμα και για κακώς ορισμένους Εσσιανούς πίνακες, η οποία όμως έρχεται με υπολογιστικό κόστος.
Όλοι οι υπολογισμοί για τη μέθοδο βρίσκονται στο αρχείο \textbf{Script\_4\_LevMar.m}
\section{Σύγκριση των μεθόδων}
Εκτελώντας όλους του αλγόριθμους για τα ίδια δεδομένα, \textbf{για τον αριθμό επαναλήψεων} έχουμε: \\
\subsection{Σημείο εκκίνησης (0,0)}
Για το σημείο $x_k = (0, 0)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0 \\ 0 \end{bmatrix}$ και ο εσσιανός $H(x_k) = \begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix}$ με αποτέλεσμα η μέθοδος και εδώ να μην μπορεί να εφαρμοστεί για κανένα τρόπο υπολογισμού βήματος.
\begin{itemize}
\item ...
\end{itemize}
\subsection{Σημείο εκκίνησης (-1,1)}
Για το σημείο $x_k = (0, 0)$ η κλίση της $f$ είναι: $\nabla f(x_k) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$ και η μέθοδος μπορεί να εφαρμοστεί.
\par
\underline{Σταθερό βήμα} \\
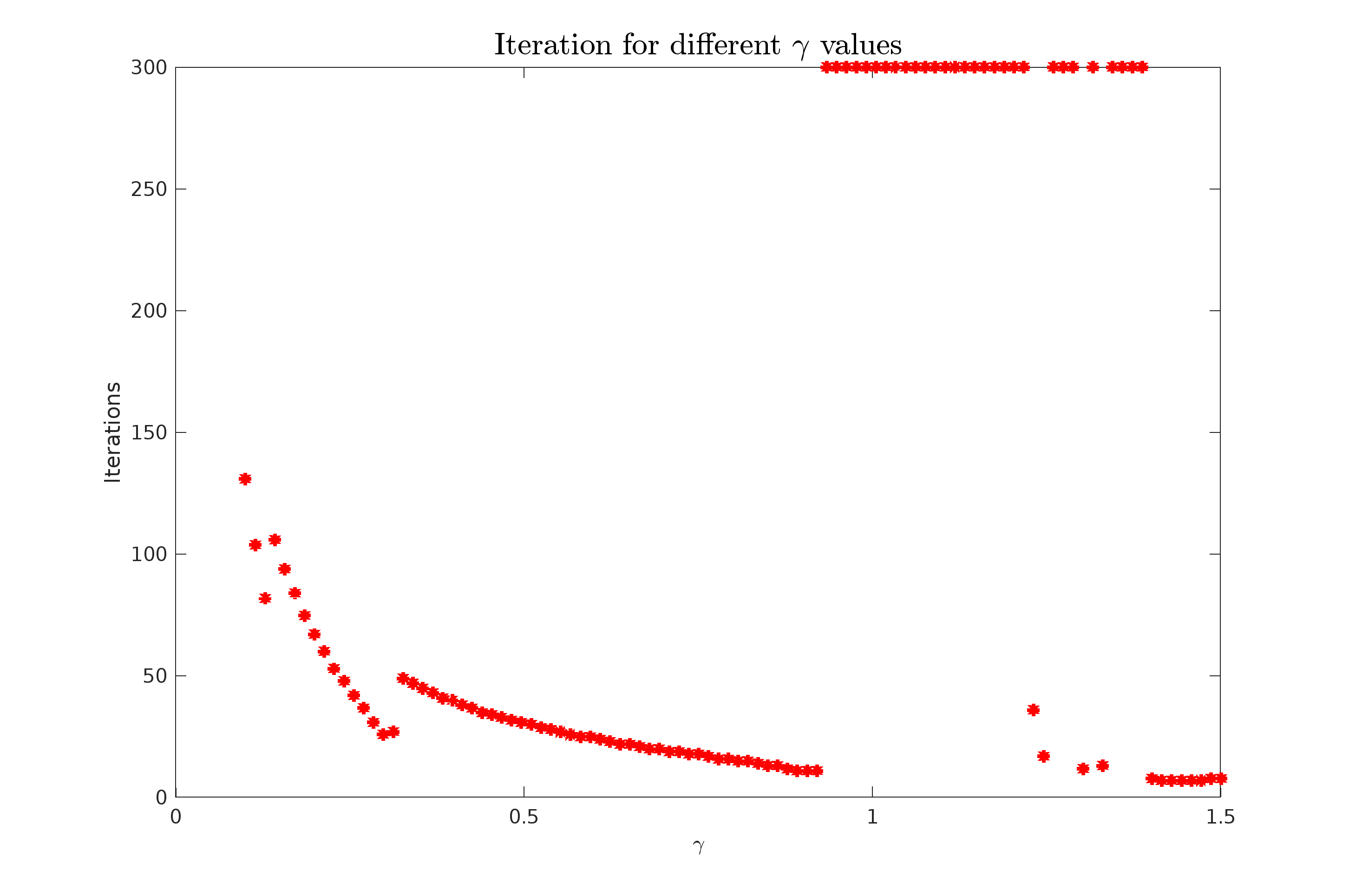
Επιλέγοντας ακρίβεια $\epsilon = 0.0001$, προσπαθούμε να βρούμε τον συντελεστή $\epsilon$ για τον οποίο η μέθοδος είναι σταθερή.
Κατόπιν εκτελούμε την μέθοδο \textit{method\_lev\_mar()} και υπολογίζουμε τον αριθμό επαναλήψεων για διαφορετικές τιμές $\gamma_k$.
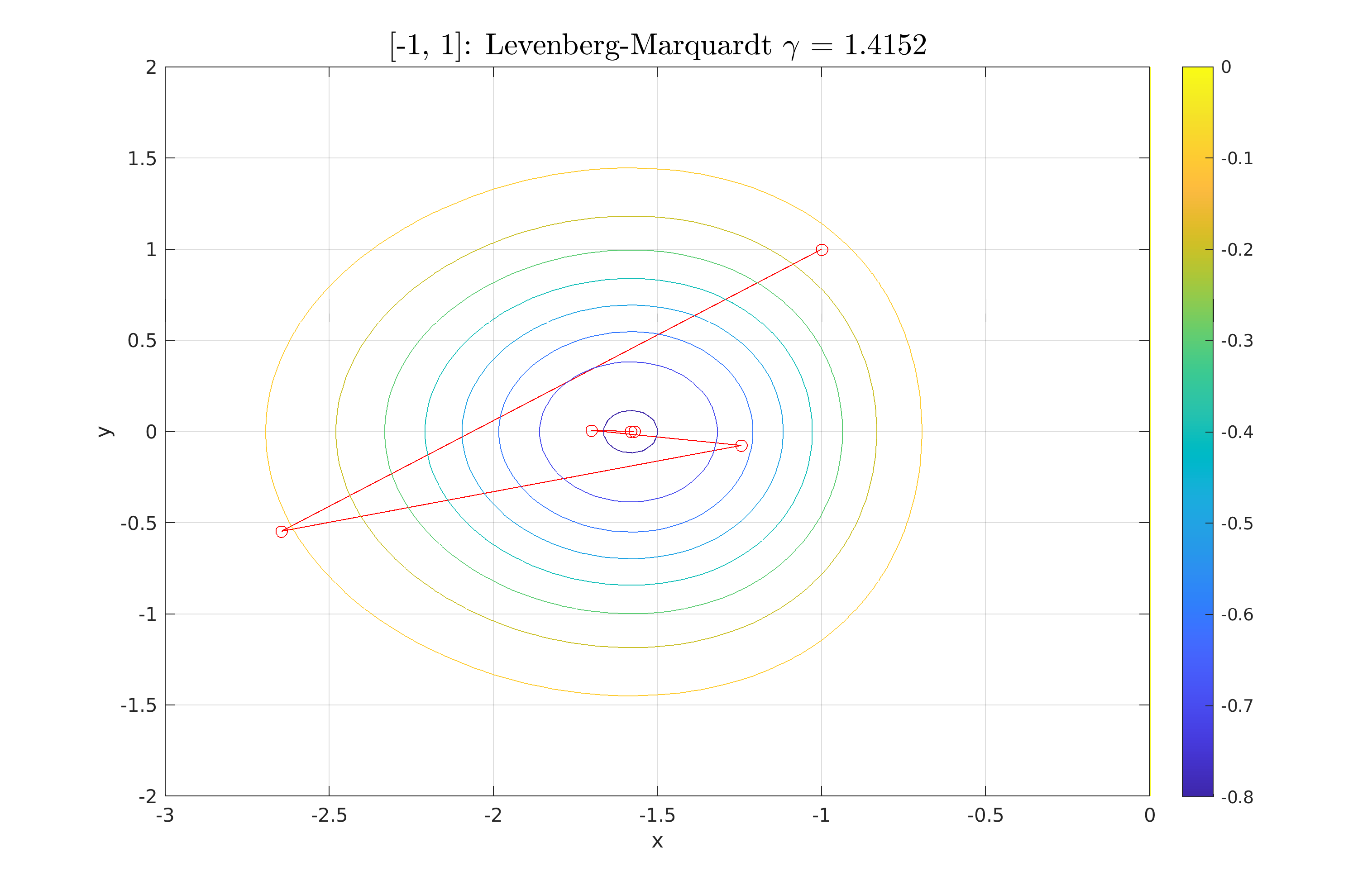
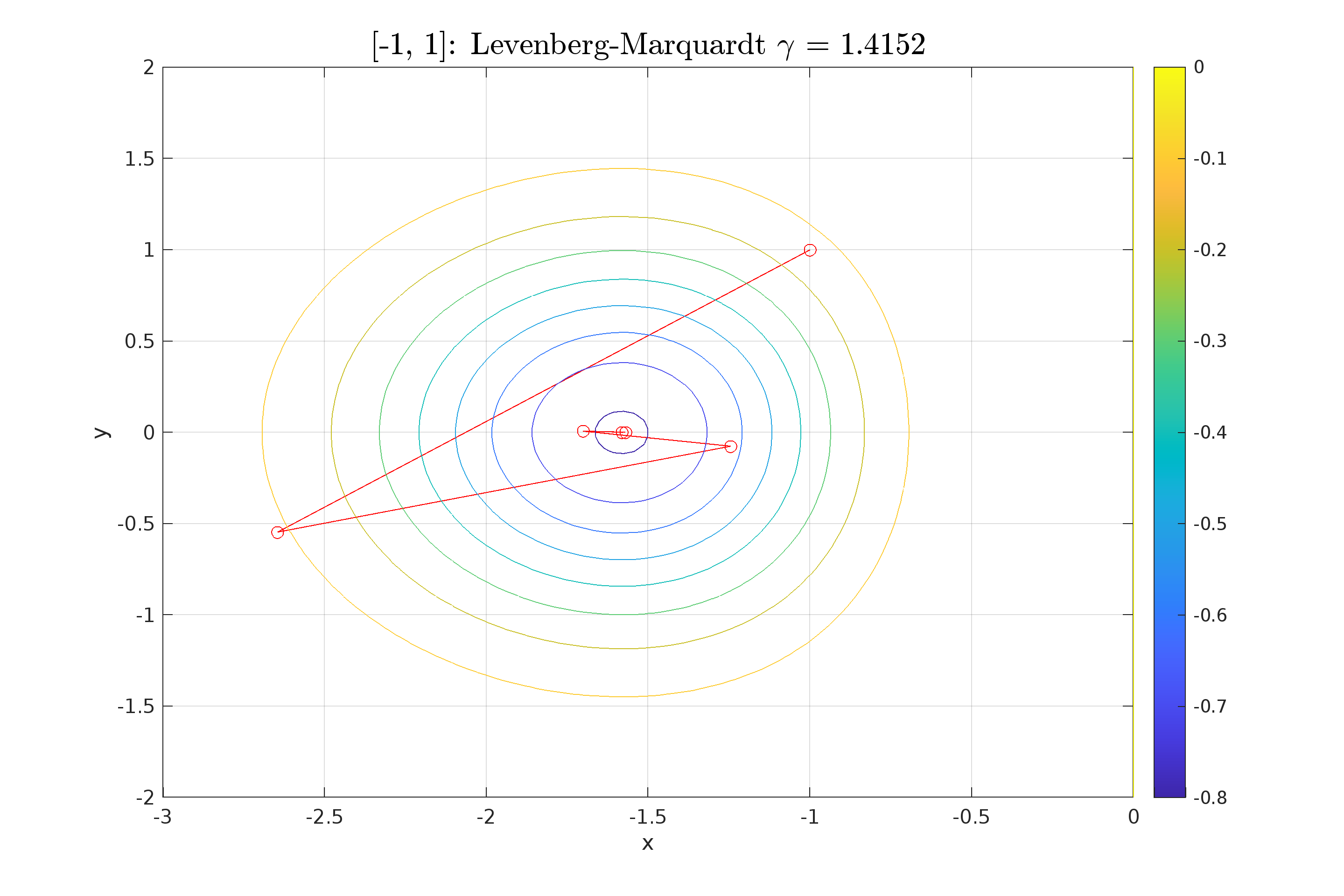
Μετά από tuning, καταλήξαμε στην τιμή $\epsilon = 0.3$ για την οποία αναζητήσαμε και υπολογίσαμε το βήμα $\gamma_k = 1.4152$ με τη γρηγορότερη σύγκλιση.
\InsertFigure{H}{0.8}{fig:LevMar_Iter_o_gamma_2}{../scripts/figures/LevMar_Iter_o_gamma_2.png}{Αριθμός επαναλήψεων για διαφορετικές τιμές $\gamma_k$ [Μέθοδος L-M].}
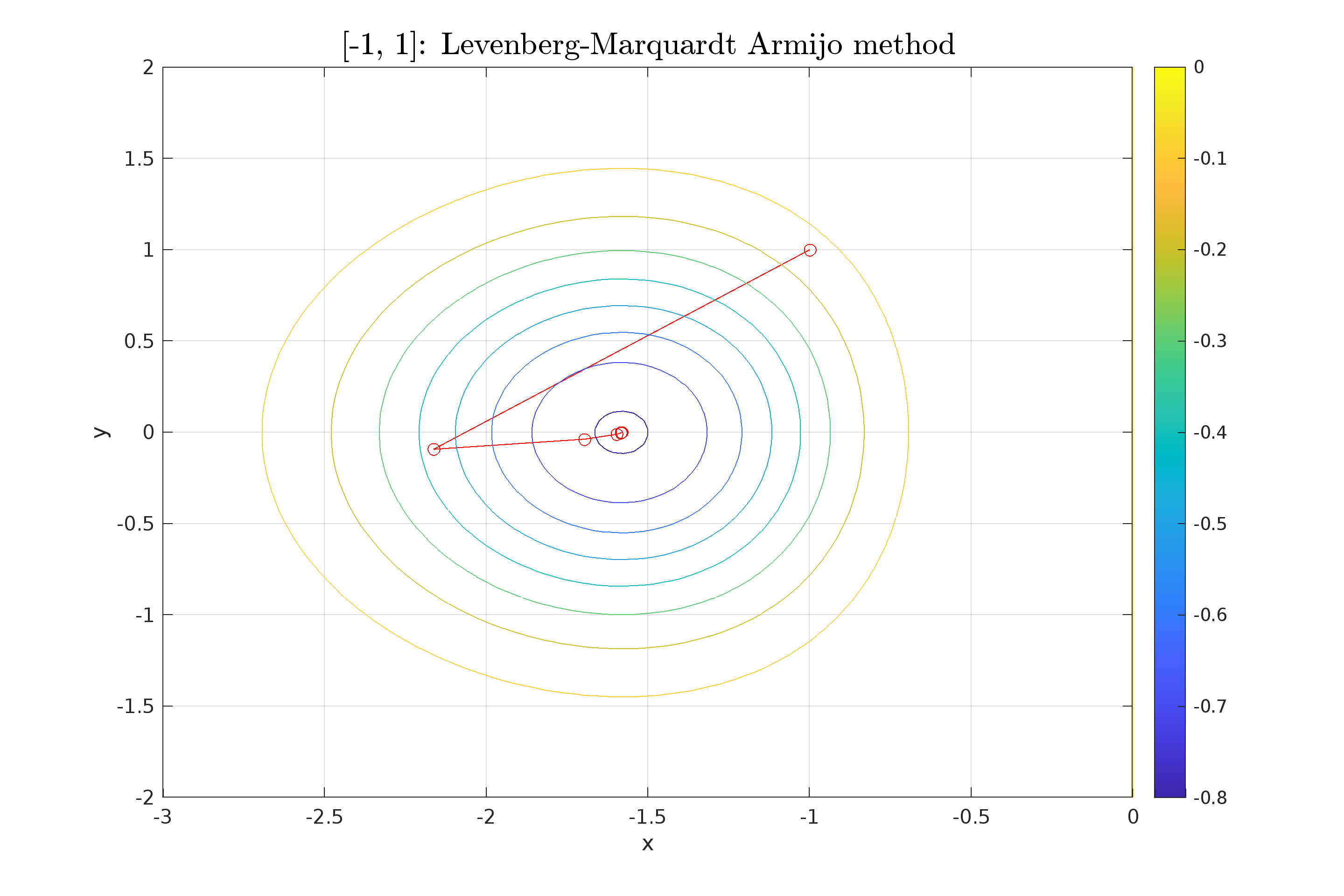
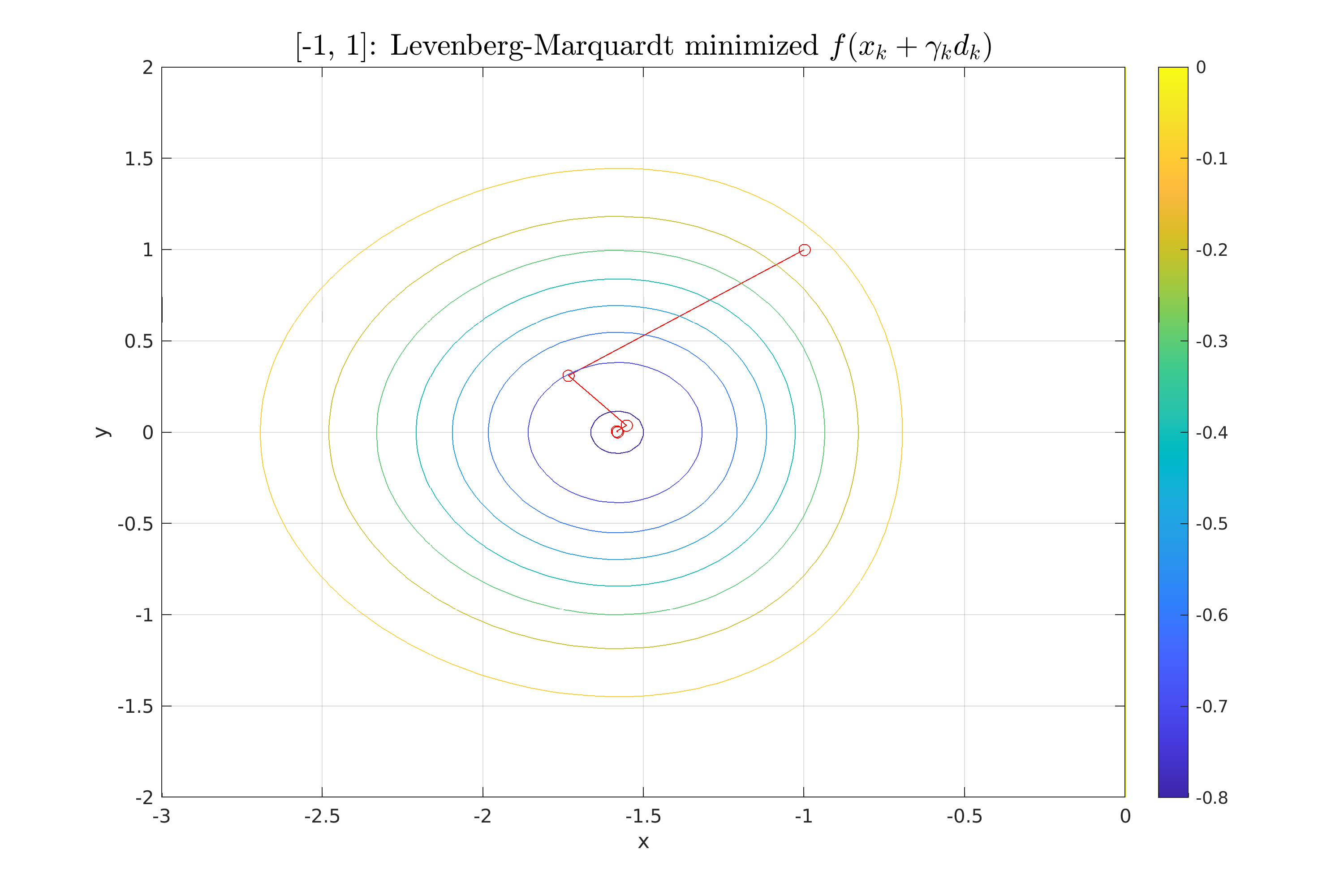
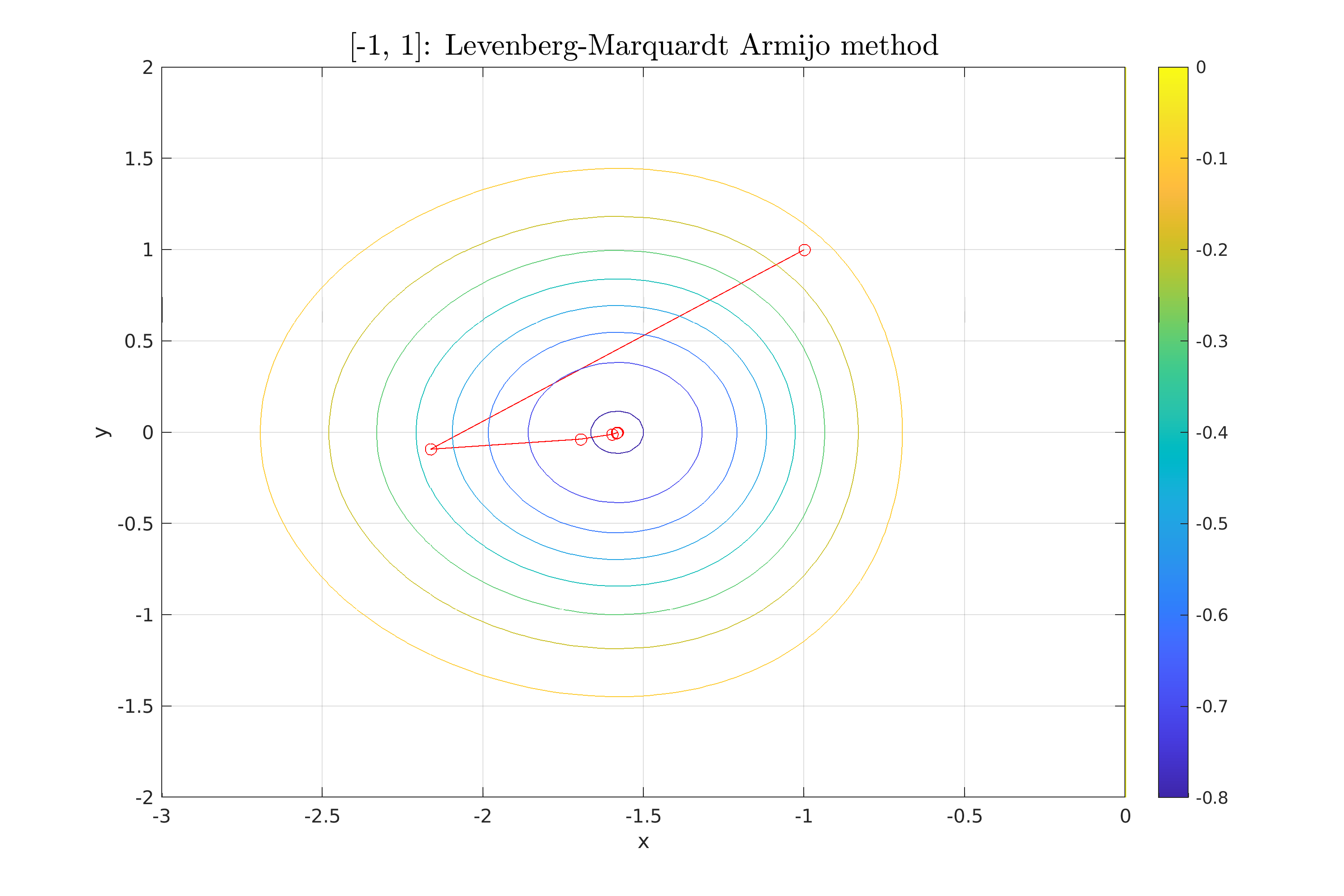
Στο παρακάτω σχήμα \ref{fig:LevMar_fixed_2} αναπαριστούμε την πορεία των σημείων καθώς συγκλίνουν στο ελάχιστο.
Παρατηρούμε ωστόσο ότι η μέθοδος κάνει αρκετή "διόρθωση πορείας" μέχρι τη σύγκλιση.
\InsertFigure{H}{0.8}{fig:LevMar_fixed_2}{../scripts/figures/LevMar_fixed_2.png}{Σύγκλιση της μεθόδου Levenberg-Marquardt [fixed $\gamma_k$].}
\par
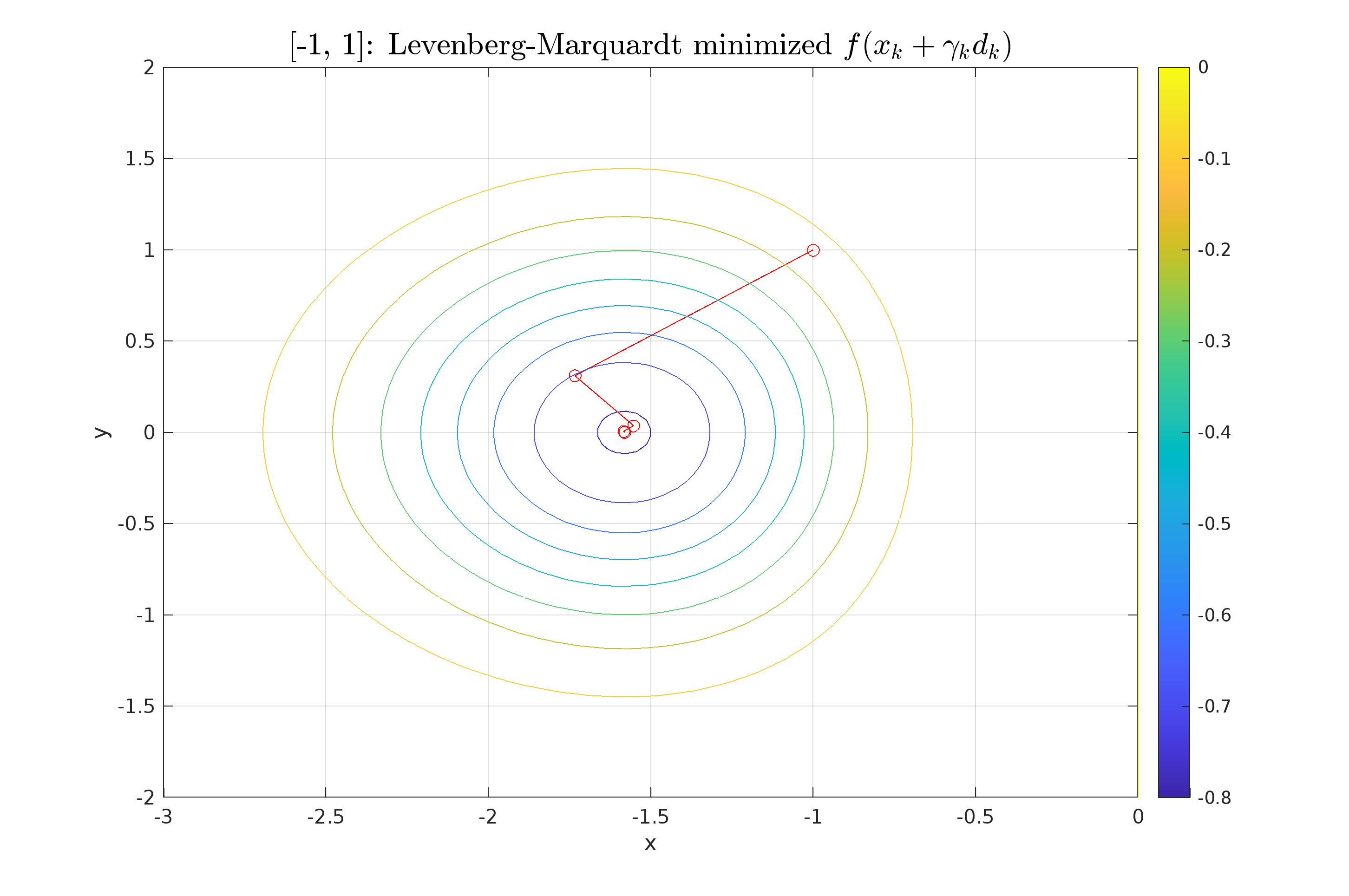
\underline{Ελαχιστοποίηση της $f(x_k + \gamma_k d_k$)} \\
Για την ελαχιστοποίηση της $f$, χρησιμοποιήθηκε και εδώ η bisection από την προηγούμενη εργασία.
\InsertFigure{H}{0.8}{fig:LevMar_minimized_2}{../scripts/figures/LevMar_minimized_2.png}{Σύγκλιση της μεθόδου Levenberg-Marquardt [minimized f].}
Από το γράφημα φαίνεται τόσο ότι η μέθοδος συγκλίνει κοντά στο ελάχιστο, όσο και ότι πραγματοποιεί “διορθώσεις πορείας”, μικρότερες όμως από αυτές του σταθερού βήματος.
\par
\underline{Armijo rule} \\
Για τη μέθοδο η βασική ιδέα και εδώ είναι να ξεκινήσει ο αλγόριθμος από ένα μεγάλο $\gamma_k = 1$ και συνεχώς να μειώνεται με βάση τον κανόνα Armijo.
Μετά από ένα tuning των παραμέτρων της μεθόδου καταλήξαμε στα $\beta=0.4, \sigma=0.1$
\InsertFigure{H}{0.8}{fig:LevMar_armijo_2}{../scripts/figures/LevMar_armijo_2.png}{Σύγκλιση της μεθόδου Levenberg-Marquardt [armijo rule].}
\par
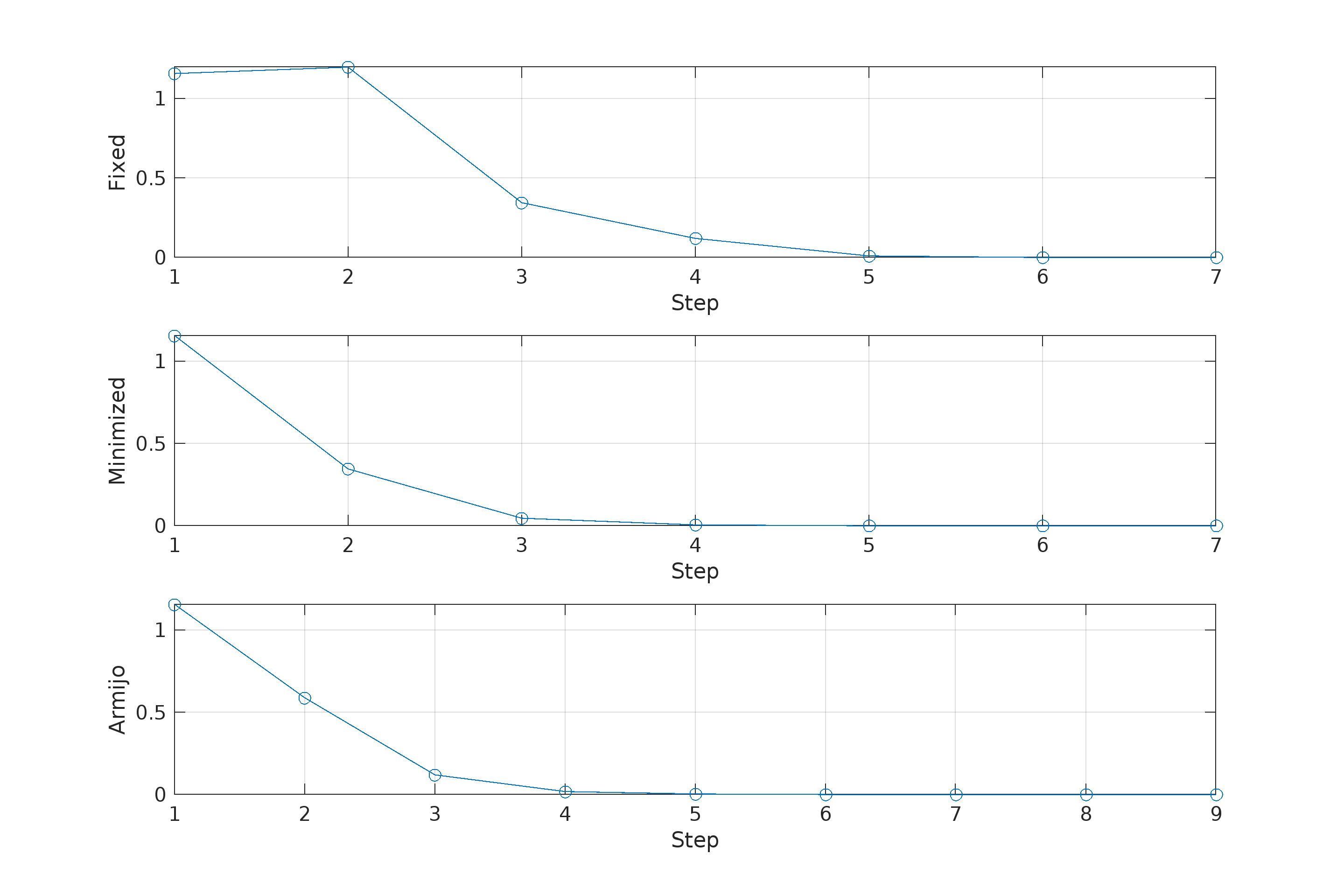
\underline{Σύγκριση} \\
Στο παρακάτω διάγραμμα φαίνονται τα βήματα αλλά ο ρυθμός σύγκλισης της κάθε μεθόδου.
\InsertFigure{H}{0.8}{fig:LevMar_compare_2}{../scripts/figures/LevMar_compare_2.png}{Ευκλείδεια απόσταση από το ελάχιστο για κάθε μέθοδο υπολογισμού $\gamma_k$ [Levenberg-Marquardt].}
\subsection{Σημείο εκκίνησης (1,-1)}
Για το σημείο (1, -1) η τιμή της $f$ είναι: $f(1, -1) = -0.1353$ και το διάνυσμα της κλίσης: $\nabla f(0,0) = \begin{bmatrix} 0.4060 \\ 0.2707 \end{bmatrix}$, επομένως μπορούμε να εφαρμόσουμε τη μέθοδο.
\par
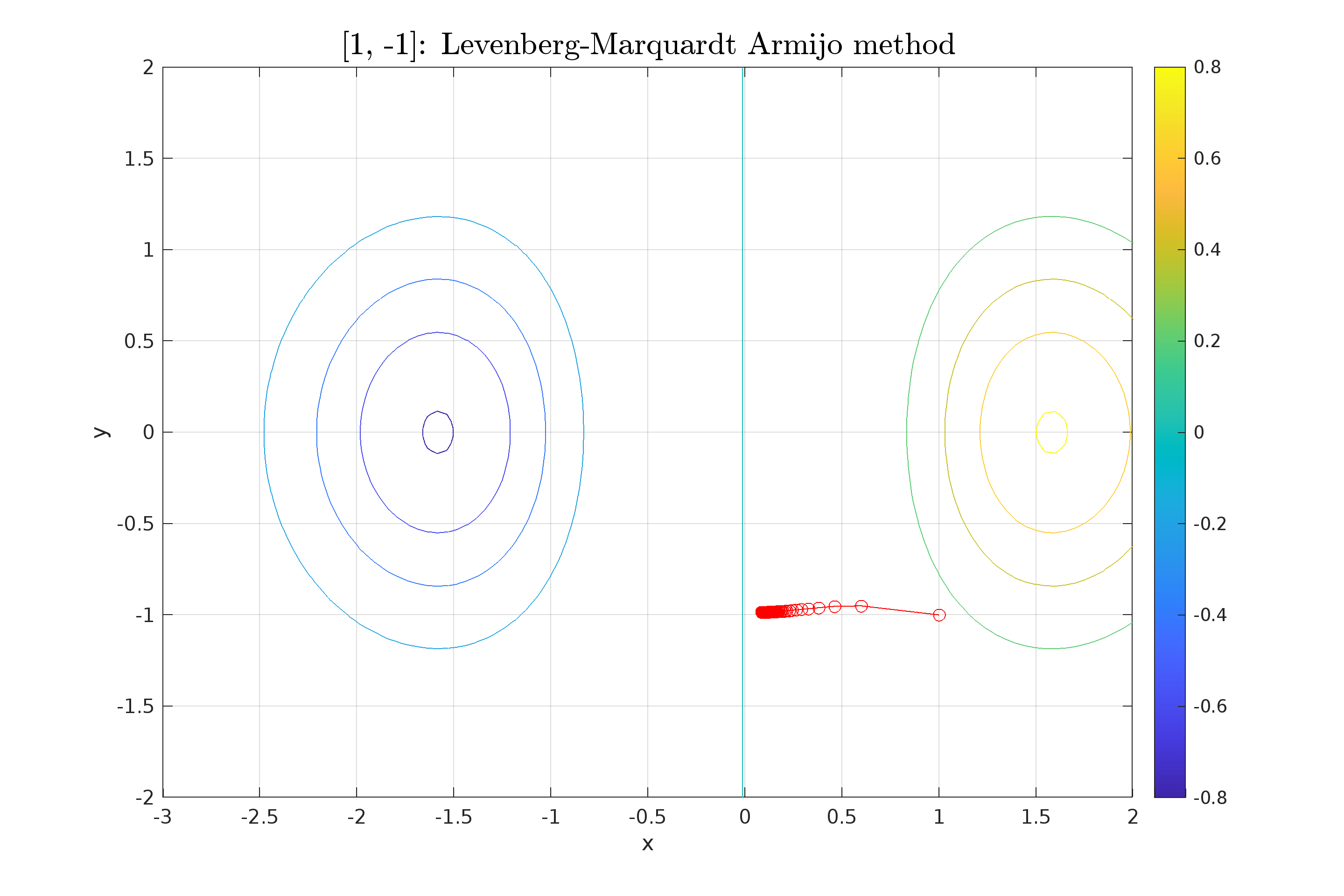
\underline{Σταθερό βήμα} \\
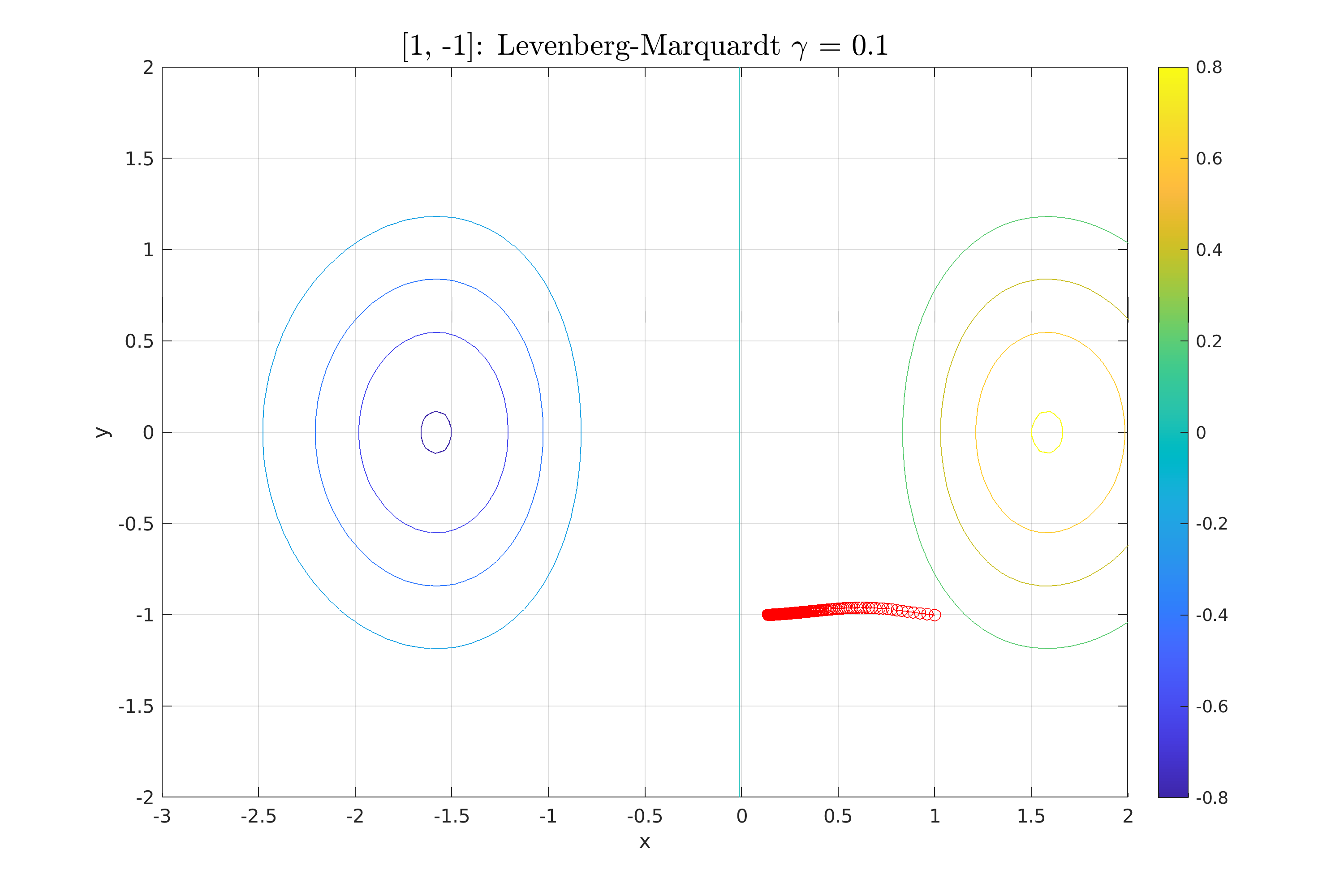
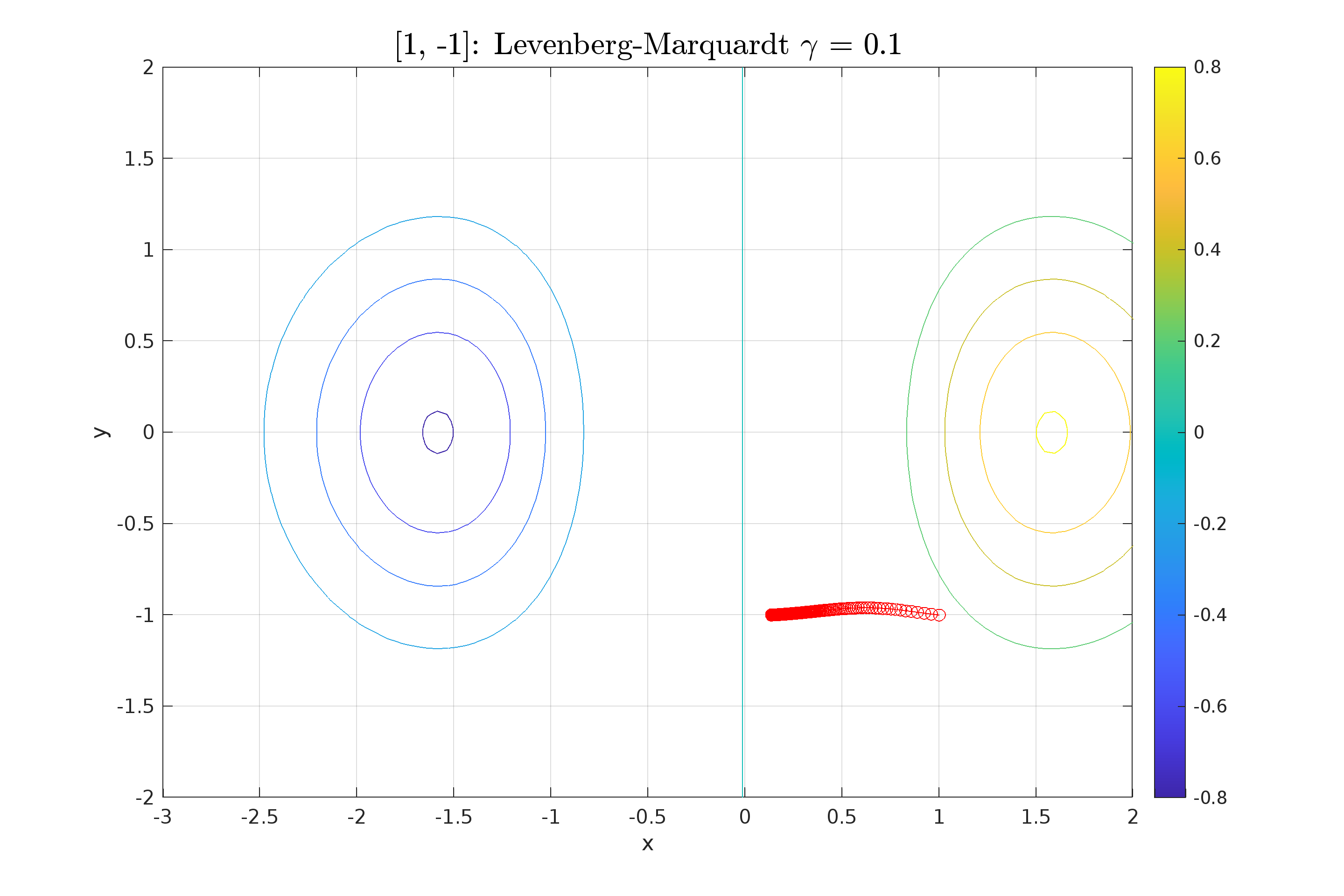
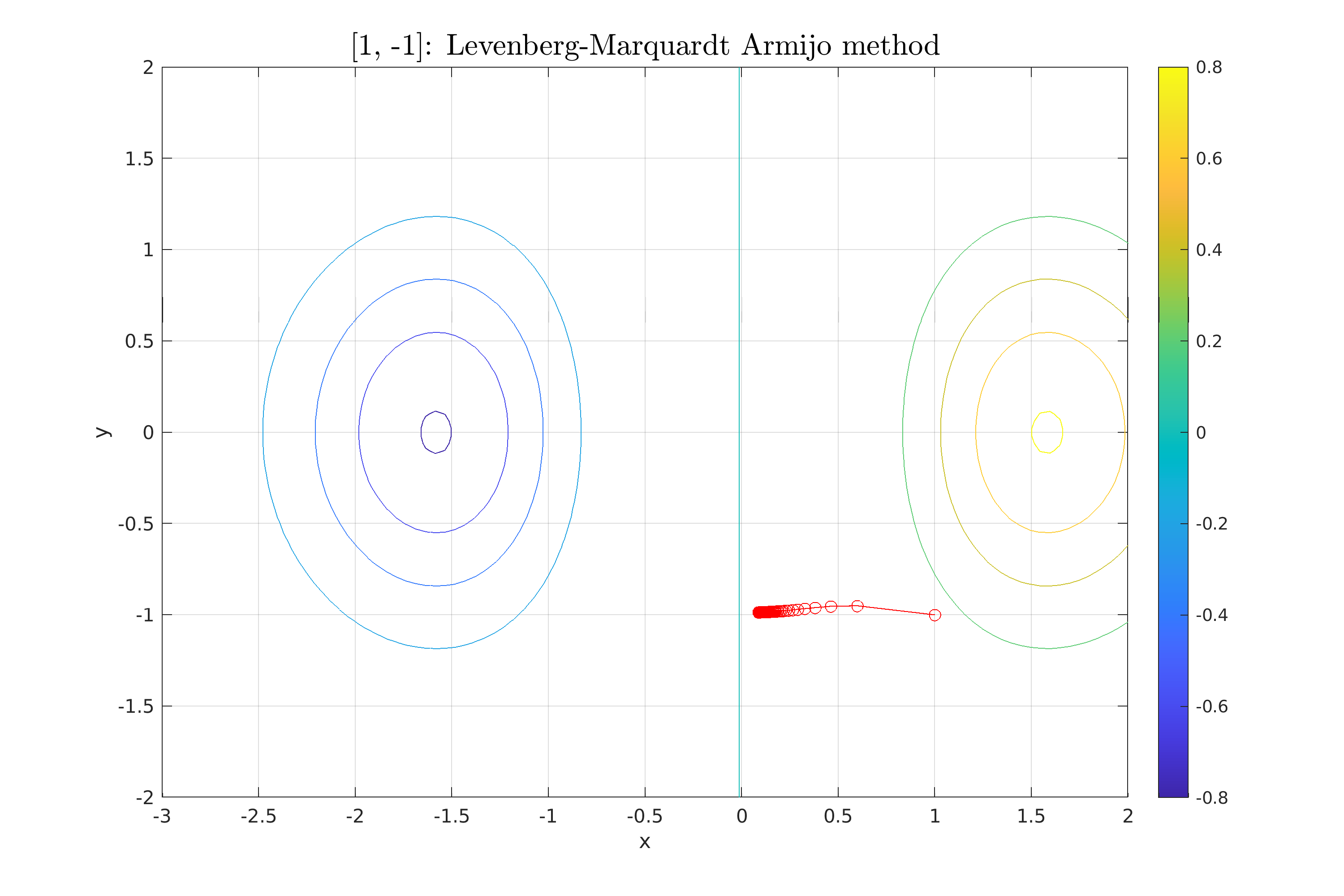
Για σταθερό βήμα εκτελέσαμε διαδοχικά τη μέθοδο \textit{method\_lev\_mar()} για να υπολογίσουμε τον αριθμό επαναλήψεων για διαφορετικές τιμές $\gamma_k$, όμως σε καμία τιμή ο αλγόριθμος δεν καταφέρνει να συγκλίνει.
Παρακάτω (σχήμα \ref{fig:LevMar_fixed_3}), παραθέτουμε ένα παράδειγμα $\gamma_k = 0.1$, όπου ο αλγόριθμος εγκλωβίζεται στο δεξιό ημιεπίπεδο.
\InsertFigure{H}{0.8}{fig:LevMar_fixed_3}{../scripts/figures/LevMar_fixed_3.png}{Μη σύγκλιση της μεθόδου Levenberg-Marquardt [Fixed step].}
\par
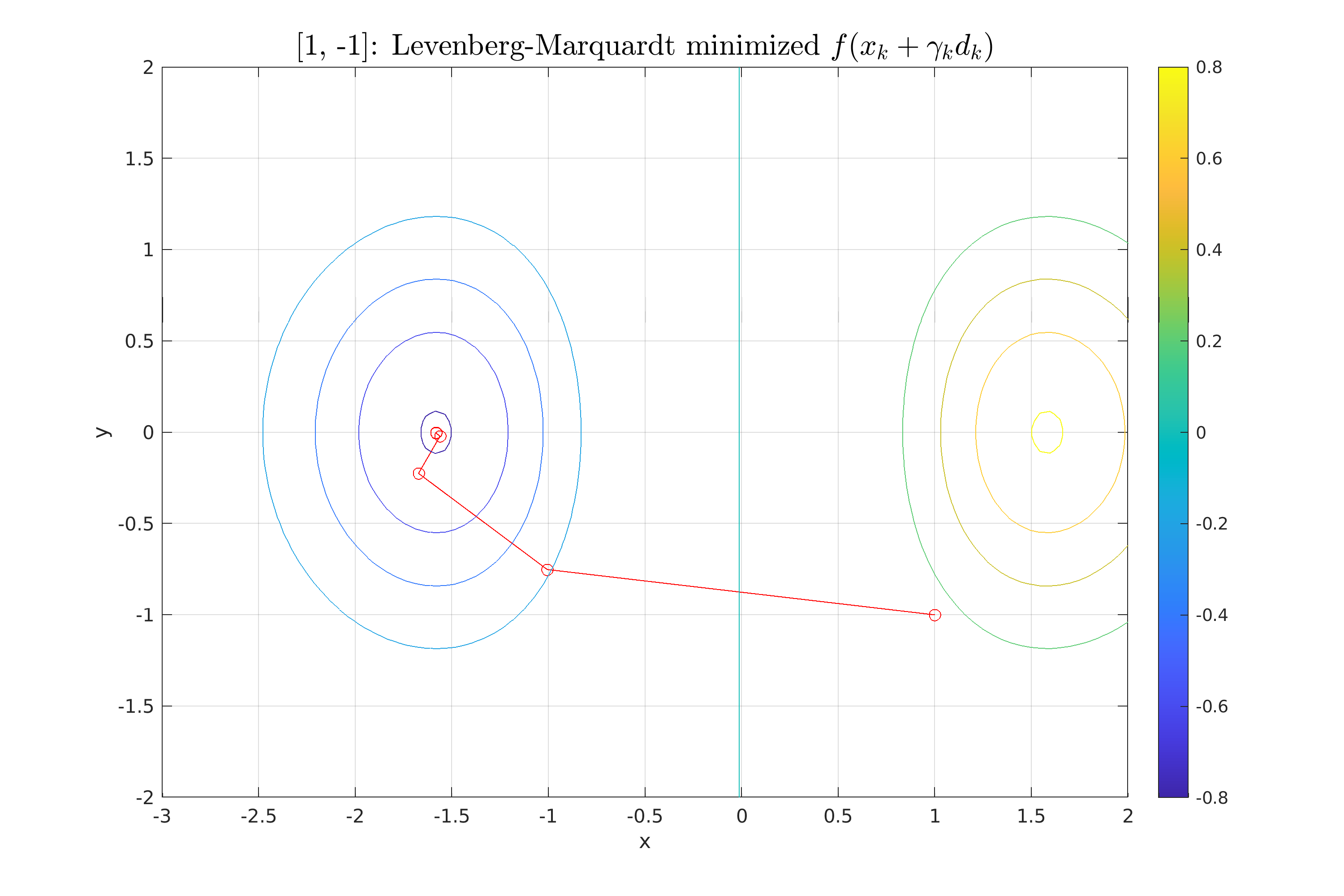
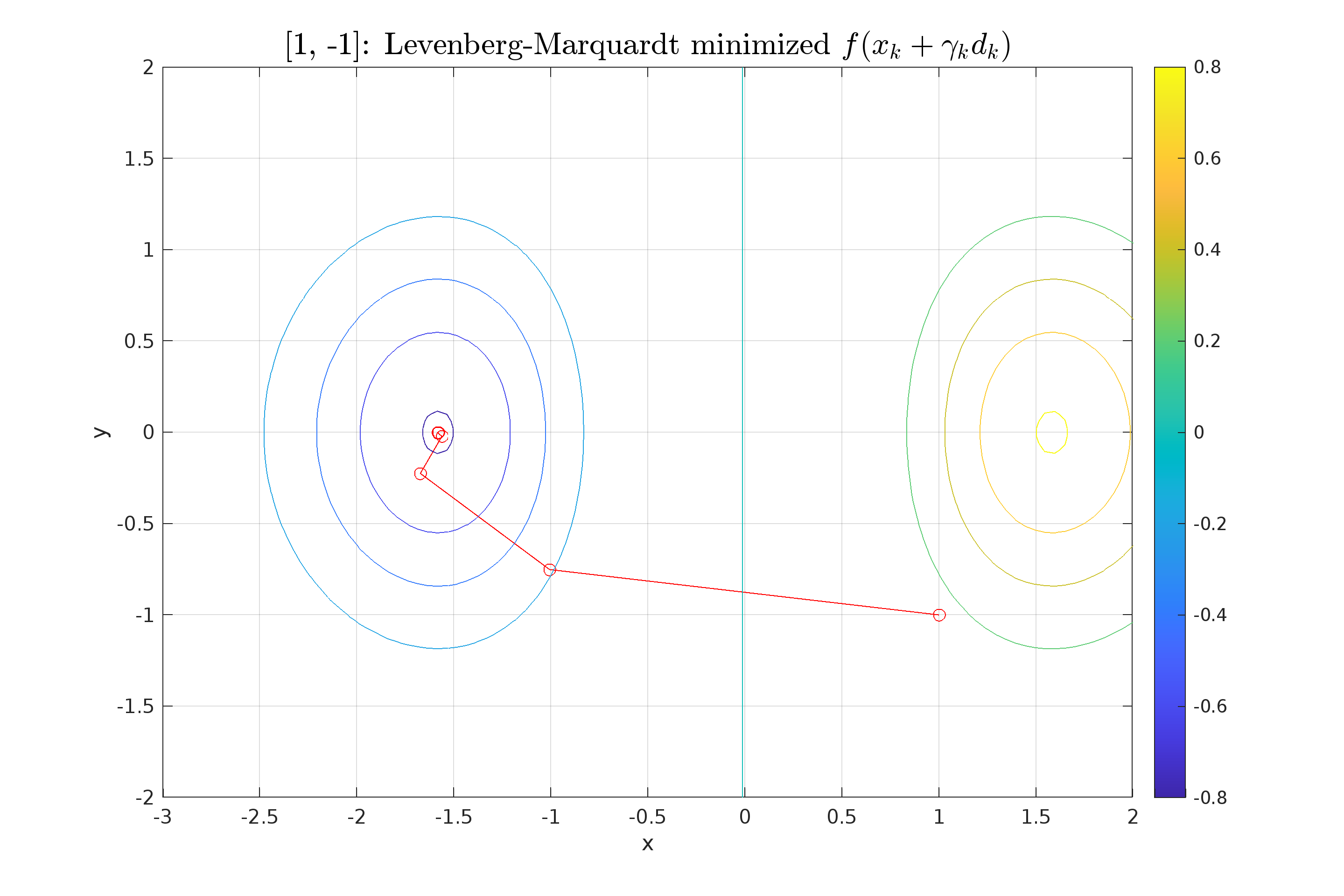
\underline{Ελαχιστοποίηση της $f(x_k + \gamma_k d_k$)} \\
\InsertFigure{H}{0.8}{fig:LevMar_minimized_3}{../scripts/figures/LevMar_minimized_3.png}{Σύγκλιση της μεθόδου Levenberg-Marquardt [minimized f].}
Για υπολογισμό βήματος ελαχιστοποιώντας τη $f(x_k + \gamma_k d_k)$, όπως φαίνεται και από το γράφημα \ref{fig:LevMar_minimized_3}, η μέθοδος συγκλίνει, καταφέρνοντας να περάσει την περιοχή με μηδενικές κλίσεις κοντά στον άξονα των $\psi$.
\section{Συμπεράσματα}
Οι μέθοδοι της παρούσας εργασίας αποτελούν βασικές τεχνικές για την εύρεση του τοπικού ελαχίστου ...
\par
\underline{Armijo rule} \\
\InsertFigure{H}{0.8}{fig:LevMar_armijo_3}{../scripts/figures/LevMar_armijo_3.png}{Μη σύγκλιση της μεθόδου Levenberg-Marquardt [armijo rule].}
Αντίθετα η μέθοδος armijo δεν συγκλίνει, καθώς και αυτή εγκλωβίζεται στο δεξιό ημιεπίπεδο.
\section{Σύγκριση των μεθόδων - Συμπεράσματα}
Εκτελώντας όλους του αλγόριθμους σε συνδυασμό με όλες τις μεθόδους, για το σημείο (-1, 1), \textbf{για τον αριθμό επαναλήψεων} έχουμε: \\
\noindent
\renewcommand{\arraystretch}{1.2}
\begin{tabularx}{\textwidth}{%
>{\raggedleft\arraybackslash}m{0.21\textwidth} |
>{\centering\arraybackslash}m{0.21\textwidth} |
>{\centering\arraybackslash}m{0.21\textwidth} |
>{\centering\arraybackslash}m{0.21\textwidth}
}
Μέθοδος & Σταθερό βήμα & Ελαχιστοποίηση της f & Armijo \\
\hline
St. Descent & 11 & 10 & 11 \\
Newton & - & - & - \\
Lev-Mar & 7 & 7 & 9
\end{tabularx} \\ [2ex]
Από τον παραπάνω πίνακα, αλλά και από τη πορεία σύγκλισης συμπεραίνουμε πως ο αλγόριθμος Lev-Mar είναι ο πιο αποδοτικός.
Επίσης σε συνδυασμό με τον τρόπο επιλογής βήματος το οποίο ελαχιστοποιεί τη $f(x_k + \gamma_kd_k)$ ο αλγόριθμος εκτός από γρηγορότερος, καταφέρνει να απεγκλωβίζεται από περιοχές με πολύ μικρή κλίση.
Αντίθετα οι μέθοδοι με σταθερό βήμα και armijo, φαίνεται ότι παρουσιάζουν τοπικό χαρακτήρα, καθώς εγκλωβίζονται εύκολα, με αποτέλεσμα να μην υπάρχει εγγύηση ότι το σημείο που βρέθηκε είναι ολικό ελάχιστο.
Ακόμα η μέθοδος Newton δεν φάνηκε να μπορεί να χρησιμοποιηθεί στην παρούσα εργασία, καθώς η επιλογή των σημείων ήταν τέτοια που είτε η κλίση ήταν 0, είτε ο Εσσιανός κακώς ορισμένος.
Αυτό φυσικά αναδεικνύει απλώς την μικρότερη εφαρμοσιμότητα του αλγορίθμου.

 Christos Choutouridis
před 2 měsíci
Christos Choutouridis
před 2 měsíci
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}